- ASIC
- バッテリー マネージメントIC
- クロックとタイミングソリューション
- ESDおよびサージ保護デバイス
- 自動車用イーサネット
- 評価ボード
- 高信頼性(HiRel)
- アイソレーター
- メモリ
- マイクロコントローラー
- パワー
- RF
- セキュリティ ソリューションおよびスマートカードソリューション
- センサー技術
- 小信号トランジスタおよびダイオード
- トランシーバー
- ユニバーサル シリアル バス(USB)
- ワイヤレス接続
- Search Tools
- Technology
- Packages
- Product Information
- ご注文
- 概要
- 組込みフラッシュIPソリューション
- フラッシュプラスRAM MCPソリューション
- F-RAM (強誘電体RAM)
- NORフラッシュ
- nvSRAM (不揮発性 SRAM)
- PSRAM – 擬似スタティックRAM
- 耐放射線・高信頼性メモリ
- SRAM (スタティック RAM)
- ウェーハおよびダイメモリソリューション
- 概要
- AURIX™ TriCore™ MCU
- PSOC™ MCU
- TRAVEO™ T2G MCU
- XMC™ MCUs
- レガシーMCU
- MOTIX™ モーター制御SoC/SiP
- 概要
- アンテナクロススイッチ
- アンテナチューナー
- バイアスと制御
- カプラ
- ドライバアンプ
- 耐放射線マイクロ波とRF
- ローノイズアンプ (LNA)
- 高周波ダイオード
- RFスイッチ
- RFトランジスタ
- ワイヤレス制御向けレシーバー
- 概要
- Calypso®製品
- CIPURSE™ 製品
- 非接触メモリ
- OPTIGA™の組込みセキュリティ ソリューションの詳細
- SECORA™セキュリティソリューション
- セキュリ ティコントローラー
- スマートカードモジュール
- 政府ID向けスマートソリューション
- 概要
- ToF 3D イメージセンサー
- 電流センサー
- ガスセンサー
- 誘導型位置センサー
- MEMSマイクロフォン
- 圧力センサー
- レーダーセンサー
- 磁気位置センサー
- 磁気速度センサー
- Capacitive sensors
- Temperature sensors
- Battery sensors
- Digital X-ray
- Computed tomography
- Sensor interface ASICs
- 概要
- USB 2.0 ペリフェラル コントローラー
- USB 3.2 ペリフェラル コントローラー
- USB ハブ コントローラー
- USB PD高電圧マイクロコントローラー
- USB-C AC-DC および DC-DC 充電ソリューション
- USB-C充電ポートコントローラー
- USB-Cパワーデリバリー コントローラー
- 概要
- AIROC™ オートモーティブワイヤレス
- AIROC™ Bluetooth®およびマルチプロトコル
- AIROC™ コネクトテッドMCU
- AIROC™ Wi-Fi + Bluetooth®コンボ
- AIROC™ Ultra-Wide Band Solutions
- 概要
-
32 ビット TriCore™ AURIX™ – TC2x
- 概要
- AURIX™ ファミリー – TC21xL
- AURIX™ファミリー – TC21xSC (ワイヤレス充電)
- AURIX™ ファミリー – TC22xL
- AURIX™ ファミリー – TC23xL
- AURIX™ ファミリー – TC23xLA (ADAS)
- AURIX™ ファミリー – TC23xLX
- AURIX™ ファミリー – TC264DA (ADAS)
- AURIX™ ファミリー – TC26xD
- AURIX™ ファミリー – TC27xT
- AURIX™ ファミリー – TC297TA (ADAS)
- AURIX™ ファミリー – TC29xT
- AURIX™ファミリー – TC29xTT (ADAS)
- AURIX™ ファミリー – TC29xTX
- AURIX™ TC2xx (エミュレーションデバイス)
-
32 ビット TriCore™ AURIX™ – TC3x
- 概要
- AURIX™ ファミリー TC32xLP
- AURIX™ ファミリー – TC33xDA
- AURIX™ ファミリー - TC33xLP
- AURIX™ ファミリー – TC35xTA (ADAS)
- AURIX™ ファミリー – TC36xDP
- AURIX™ ファミリー – TC37xTP
- AURIX™ ファミリー – TC37xTX
- AURIX™ ファミリー – TC38xQP
- AURIX™ ファミリー – TC39xXA (ADAS)
- TC39xXX/XP
- AURIX™ ファミリー – TC3Ex
- AURIX™ TC37xTE (エミュレーションデバイス)
- AURIX™ TC39xXE (エミュレーションデバイス)
- 32 ビット TriCore™ AURIX™ - TC4x
- 概要
- PSOC™ 4 Arm® Cortex® -M0/M0+
- PSOC™ 4 HV Arm® Cortex® -M0+
- PSOC™ 5 LP Arm® Cortex® -M3
- PSOC™ 6 Arm® Cortex®-M4 / M0+
- PSOC™マルチタッチタッチスクリーンコントローラー
- PSOC™ Control C3 Arm® Cortex®-M33
- 自動車用PSOC™ 4 Arm® Cortex®-M0/M0+
- PSOC™ Edge Arm® Cortex® M55/M33
- PSOC™ Control C1 Arm® Cortex®-M0
- 概要
- ボディ用32ビットTRAVEO™T2G Arm® Cortex®
- クラスター用の 32 ビット TRAVEO™ T2G Arm® Cortex®
- 概要
- 32ビットMCU
- レガシー8ビット/16ビットマイクロコントローラー
- その他レガシーマイクロコントローラー
- 32ビットFM Arm® Cortex® マイクロコントローラー
- センシングコントローラー
- 概要
- 整流ブリッジおよびACスイッチ
- CoolSiC™ ショットキーダイオード
- ダイオードベアダイ
- Si ダイオード
- サイリスタ/ダイオード パワーモジュール
- サイリスタソフトスタータモジュール
- サイリスタ / ダイオードディスク
- 概要
- 車載ゲートドライバ IC
- GaN HEMT用ゲートドライバIC
- SiC MOSFET用ゲートドライバIC
- ハーフブリッジ ゲートドライバIC
- ハイサイド ゲートドライバIC
- ガルバニック絶縁型ゲートドライバ
- レベルシフト
- ローサイド ゲートドライバIC
- 三相ゲートドライバIC
- トランスドライバIC
- 概要
- BLDCモータードライバ
- BDCモータードライバ
- ステッピングモーターおよびサーボモーター ドライバ
- MCU搭載モータードライバ
- MOSFETを使用したブリッジドライバ
- ゲートドライバIC
- 概要
- 車載用MOSFET
- デュアルMOSFET
- MOSFET(Si&SiC)モジュール
- NチャネルデプレッションモードMOSFET
- NチャネルMOSFET
- PチャネルMOSFET
- CoolSiC™ MOSFET
- 小信号/小電力MOSFET
- 概要
- IGBT モジュール
- MOSFET(Si&SiC)モジュール
- インテリジェント パワーモジュール (IPM)
- ダイオードとサイリスタ (Si/SiC)
- 車載用 IGBT および CoolSiC™ MOSFET モジュール
- 高密度パワーモジュール
- 概要
- 車載用トランシーバー
- 車載アプリケーション向けリニア電圧レギュレーター
- OPTIREG™ PMIC
- OPTIREG™スイッチャー
- OPTIREG™ システム ベーシス チップ (SBC)
- 概要
- EZ-USB™ CX3 MIPI CSI-2 to USB 5 Gbps カメラ コントローラー
- EZ-USB™ FX10 & FX5N USB 10Gbpsペリフェラルコントローラ
- EZ-USB™ FX20 USB 20 Gbpsペリフェラルコントローラー
- EZ-USB™ FX3 USB 5 Gbps ペリフェラル コントローラー
- EZ-USB™ FX3S USB 5 Gbps ペリフェラル コントローラー (ストレージ インターフェース付き)
- EZ-USB™ FX5 USB 5 Gbpsペリフェラルコントローラー
- EZ-USB™ SD3 USB 5 Gbps ストレージコントローラー
- EZ-USB™ SX3: FIFOインターフェースの USB 5 Gbps ペリフェラル コントローラー
- 概要
- EZ-PD™ CCG3 USB Type-Cポート コントローラーPD
- EZ-PD™ CCG3PA USB-C および PD
- EZ-PD™ CCG3PA-NFET USB-C PD コントローラー
- EZ-PD™ CCG7x シングルポート USB-Cパワーデリバリーおよび DC-DC コントローラー
- EZ-PD™ PAG1: 第 1 世代電源アダプター
- EZ-PD™ PAG2: 第 2 世代電源アダプター
- EZ-PD™ PAG2-PD USB-C PD コントローラー
- 概要
- EZ-PD™ ACG1F 1ポートUSB-Cコントローラー
- EZ-PD™ CCG2 USB Type-Cポート コントローラー
- EZ-PD™ CCG3PA車載用USB-Cおよびパワーデリバリーコントローラー
- EZ-PD™ CCG4 2 ポートUSB-CおよびPD
- EZ-PD™ CCG5デュアルポートおよび CCG5C シングルポート USB-C PDコントローラー
- EZ-PD™ CCG6 1ポート USB-C & PDコントローラー
- EZ-PD™ CCG6_CFP および EZ-PD™ CCG8_CFPデュアルシングルポート USB-C PD
- EZ-PD™ CCG6DFデュアルポートおよびCCG6SFシングルポートUSB-C PDコントローラー
- EZ-PD™ CCG7D車載用デュアルポートUSB-C PD + DC-DCコントローラー
- EZ-PD™ CCG7S車載用シングルポートUSB-C PDソリューション (DC-DCコントローラーおよびFET内蔵)
- EZ-PD™ CCG8デュアル シングル ポートUSB-C PD
- EZ-PD™ CMG1 USB-C EMCAコントローラー
- 拡張パワーレンジ (EPR) 搭載EZ-PD™ CMG2 USB-C EMCA
コアアーキテクチャ別に参照
主要テクノロジー別に参照
- 最新情報:
- 航空宇宙および防衛
- AIとデータセンター
- 自動車
- 通信
- 民生用電子機器
- ヘルスケアとライフスタイル
- 産業用アプリケーション
- セキュリティソリューション
- スマートホームとスマートビルディング
- ソリューション
- 概要
- 電源アダプターと充電器
- スマートテレビ向けの完全なシステムソリューション
- モバイルデバイスとスマートフォンソリューション
- ホームエンターテインメント アプリケーション向けの半導体ソリューション
- スマート会議システム
- ドローン
- AR and smart glasses
- 太陽光発電
- コンシューマーウェアラブル
- 家電製品
- 概要
- 電源アダプターと充電器
- 資産管理の追跡
- バッテリーの形成とテスト
- 電動フォークリフト
- バッテリー蓄電 (BESS)
- EV充電
- 高電圧ソリッドステート配電
- 産業用オートメーション
- 産業用モータードライブおよび制御
- 産業用ロボット
- LED 照明システムの設計
- 小型電気自動車ソリューション
- 送配電
- トラクション
- 無停電電源装置 (UPS)
- Digital health
- ロボティクス
- 風力
- 水電解槽
- 太陽光発電
- 産業用および医療用スイッチング電源 (SMPS)
- 電動工具
- 概要
- デバイス認証とブランド保護
- モノのインターネット (IoT) 向けの組み込みセキュリティ
- eSIM アプリケーション
- 公的身分証明書
- モバイルセキュリティ
- 決済ソリューション
- アクセス管理および発券ソリューション
- 概要
- 家庭用ロボット
- 空調システム (HVAC)
- ホームオートメーションとビルオートメーション
- PCアクセサリ
- ホームエンターテインメント アプリケーション向けの半導体ソリューション
- 概要
- アクティブサスペンションコントロール
- 車載用ブレーキング ソリューション
- 車載用ステアリング ソリューション
- シャーシ ドメイン制御
- 概要
- 自動車用バッテリーマネージメントシステム (BMS)
- EV充電
- 燃料電池車 (FCEV) ドライブトレインシステム
- 電気自動車用補助インバーター
- (商用車向けの) 高電圧補助インバーター
- EVトラクションインバーター
- トラクションインバーター (商用車)
- トラクションインバーター(電気二輪および三輪車)
- 電気自動車用高電圧DC-DCコンバーター
- 高電圧DC-DCコンバーター(商用車)
- 車載充電(電動商用車)
- 車載充電器 (OBC)
- 電動二輪車および三輪車用のオンボード充電(OBC)ソリューション
- 最新情報:
- デジタル ドキュメンテーション
- 評価ボード
- ファインダー & セレクション ツール
- プラットフォーム
- サービス
- オンライン シミュレーション
- ソフトウェア
- ツール
- パートナー
- インフィニオン フォー メーカーズ
- ユニバーシティ アライアンス プログラム
- 概要
- AIROC™ ソフトウェアとツール
- AURIX™のツールとソフトウェア
- 自動車ソフトウェア開発用のDRIVECORE™
- iMOTION™ ツールとソフトウェア
- インフィニオンのスマートパワースイッチおよびゲートドライバ ツールスイート
- MOTIX™ ソフトウェア&ツール
- OPTIGA™ ツールとソフトウェア
- PSOC™ ソフトウェアとツール
- TRAVEO™ ソフトウェアとツール
- XENSIV™ツールおよびソフトウェア
- XMC™ ツールとソフトウェア
- 概要
- AURIX™認証
- AURIX™開発ツール
- AURIX™組込みソフトウェア
- AURIX™マイクロコントローラーキット
- 概要
- CAPSENSE™コントローラー コンフィギュレーション ツール EZ-Click
- DC-DC統合POL電圧レギュレーター設定ツール – PowIRCenter
- EZ-USB™ SX3コンフィギュレーション ユーティリティ
- FM+ コンフィギュレーション ツール
- FMx設定ツール
- トランシーバーICコンフィギュレーション ツール
- USB EZ-PD™コンフィギュレーション ユーティリティ
- USB EZ-PD™コンフィギュレーション ユーティリティ
- USB EZ-USB™ HX3C Blaster Plusコンフィギュレーション ユーティリティ
- USB UARTコンフィギュレーション ユーティリティ
- XENSIV™タイヤ空気圧センサーのプログラミング
- 概要
- EZ-PD™ CCGx Dock ソフトウェア開発キット
- FMx Softune IDE
- ModusToolbox™ ソフトウェア
- PSOC™ ソフトウェア
- レーダー開発キット
- RUST
- USBコントローラーSDK
- ワイヤレス接続 Bluetooth メッシュヘルパー アプリケーション
- XMC™ DAVE™ソフトウェア
- 概要
- AIROC™ Bluetooth® Connect Appアーカイブ
- Cypress™ Programmerのアーカイブ
- EZ-PD™ CCGx 電力ソフトウェア開発キットのアーカイブ
- ModusToolbox™ ソフトウェアのアーカイブ
- PSOC™ Creatorのアーカイブ
- PSOC™ Designerのアーカイブ
- PSOC™ Programmerのアーカイブ
- USB EZ-PD™コンフィギュレーション ユーティリティ アーカイブ
- USB EZ-PD™ホストSDKのアーカイブ
- USB EZ-USB™ FX3のアーカイブ
- EZ-USB™ HX3PD コンフィギュレーション ユーティリティ
- WICED™ Smart SDKのアーカイブ
- WICED™ Studioのアーカイブ
- 最新情報:
- サポート
- トレーニング
- 開発者コミュニティ
- News
ビジネス&財務プレス
2026/07/13
ビジネス&財務プレス
2026/07/07
ビジネス&財務プレス
2026/07/06
ビジネス&財務プレス
2026/07/03
- 会社概要
- 私たちのストーリー
- イベント
- プレス
- 投資家向け情報
- 採用情報
- 品質
- 最新ニュース
ビジネス&財務プレス
2026/07/13
ビジネス&財務プレス
2026/07/07
ビジネス&財務プレス
2026/07/06
ビジネス&財務プレス
2026/07/03

概要
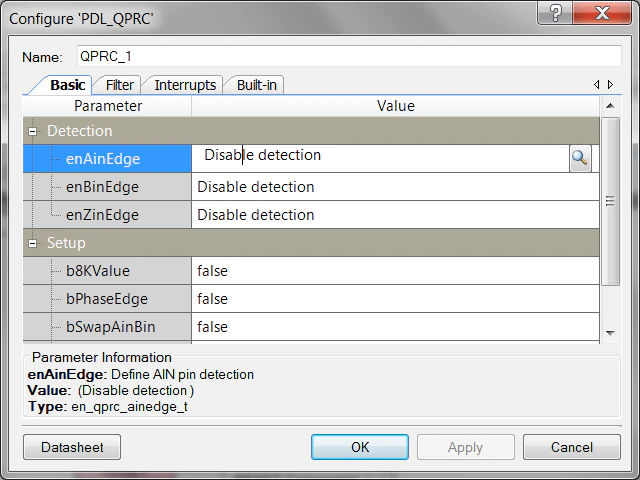
直交位置/回転カウンタ(QPRC)コンポーネントは、通常、モータ制御アプリケーションでモータの位置、速度、または回転を追跡するために使用されます。これには、3つの入力ピンのそれぞれの信号のグリッチを除去するのに役立つノイズフィルタが組み込まれています。有効なQPRC入力ではない短いパルスをフィルタリングするために、いくつかのPCLKサイクルを設定できます。
回転カウンタ(RC)は、ZINピンからの入力および/またはポジションカウンタの出力(アンダーフローまたはオーバーフロー)を受け取ります。カウンタは、構成の選択に基づいてインクリメントまたはデクリメントされます。
比較値には、位置比較値と位置と回転数の比較値 (PCRC) の 2 つがあります。
レボリューションカウンタ(RC)は、エッジまたはレベルでアクティブに構成できるZIN外部ピン、またはPCの出力(アンダーフローまたはオーバーフロー)で動作できます。このカウンタは、3 つのモードのいずれかで動作するように構成することもできます。最も単純なモードは、ZINの状態に基づく単純なアップ/ダウンカウントです。PC 位置カウントの一致 (比較操作によって決定される) は、オーバーフローおよびアンダーフロー時に RC を更新するためにも使用できます。3 番目のオプションは、前の 2 つのモードを組み合わせ、いずれかのイベントでカウントします。
これら2つのカウントスキーム(PCとRC)は、非常に柔軟で強力なモーター制御ソリューションを形成し、ファームウェアがCPUの関与を最小限に抑えてモーター速度を監視および変更できるようにします。
- ポジションおよび回転カウンターとして動作します
- 16ビット・ポジション・カウンタおよびコンペア・レジスタο
- 立ち下がり、立ち上がり、派生エッジ検出
- 外部ピン信号用の構成可能なノイズ(グリッチ)フィルタ
- 割り込み要求条件の完全なセット
直交位置/回転カウンタ(QPRC)コンポーネントは、通常、モータ制御アプリケーションでモータの位置、速度、または回転を追跡するために使用されます。これには、3つの入力ピンのそれぞれの信号のグリッチを除去するのに役立つノイズフィルタが組み込まれています。有効なQPRC入力ではない短いパルスをフィルタリングするために、いくつかのPCLKサイクルを設定できます。
回転カウンタ(RC)は、ZINピンからの入力および/またはポジションカウンタの出力(アンダーフローまたはオーバーフロー)を受け取ります。カウンタは、構成の選択に基づいてインクリメントまたはデクリメントされます。
比較値には、位置比較値と位置と回転数の比較値 (PCRC) の 2 つがあります。
レボリューションカウンタ(RC)は、エッジまたはレベルでアクティブに構成できるZIN外部ピン、またはPCの出力(アンダーフローまたはオーバーフロー)で動作できます。このカウンタは、3 つのモードのいずれかで動作するように構成することもできます。最も単純なモードは、ZINの状態に基づく単純なアップ/ダウンカウントです。PC 位置カウントの一致 (比較操作によって決定される) は、オーバーフローおよびアンダーフロー時に RC を更新するためにも使用できます。3 番目のオプションは、前の 2 つのモードを組み合わせ、いずれかのイベントでカウントします。
これら2つのカウントスキーム(PCとRC)は、非常に柔軟で強力なモーター制御ソリューションを形成し、ファームウェアがCPUの関与を最小限に抑えてモーター速度を監視および変更できるようにします。
- ポジションおよび回転カウンターとして動作します
- 16ビット・ポジション・カウンタおよびコンペア・レジスタο
- 立ち下がり、立ち上がり、派生エッジ検出
- 外部ピン信号用の構成可能なノイズ(グリッチ)フィルタ
- 割り込み要求条件の完全なセット