- ASIC
- バッテリー マネージメントIC
- クロックとタイミングソリューション
- ESDおよびサージ保護デバイス
- 自動車用イーサネット
- 評価ボード
- 高信頼性(HiRel)
- アイソレーター
- メモリ
- マイクロコントローラー
- パワー
- RF
- セキュリティ ソリューションおよびスマートカードソリューション
- センサー技術
- 小信号トランジスタおよびダイオード
- トランシーバー
- ユニバーサル シリアル バス(USB)
- ワイヤレス接続
- Search Tools
- Technology
- Packages
- Product Information
- ご注文
- 概要
- 組込みフラッシュIPソリューション
- フラッシュプラスRAM MCPソリューション
- F-RAM (強誘電体RAM)
- NORフラッシュ
- nvSRAM (不揮発性 SRAM)
- PSRAM – 擬似スタティックRAM
- 耐放射線・高信頼性メモリ
- SRAM (スタティック RAM)
- ウェーハおよびダイメモリソリューション
- 概要
- AURIX™ TriCore™ MCU
- PSOC™ MCU
- TRAVEO™ T2G MCU
- XMC™ MCUs
- レガシーMCU
- MOTIX™ モーター制御SoC/SiP
- 概要
- アンテナクロススイッチ
- アンテナチューナー
- バイアスと制御
- カプラ
- ドライバアンプ
- 耐放射線マイクロ波とRF
- ローノイズアンプ (LNA)
- 高周波ダイオード
- RFスイッチ
- RFトランジスタ
- ワイヤレス制御向けレシーバー
- 概要
- Calypso®製品
- CIPURSE™ 製品
- 非接触メモリ
- OPTIGA™の組込みセキュリティ ソリューションの詳細
- SECORA™セキュリティソリューション
- セキュリ ティコントローラー
- スマートカードモジュール
- 政府ID向けスマートソリューション
- 概要
- ToF 3D イメージセンサー
- 電流センサー
- ガスセンサー
- 誘導型位置センサー
- MEMSマイクロフォン
- 圧力センサー
- レーダーセンサー
- 磁気位置センサー
- 磁気速度センサー
- Capacitive sensors
- Temperature sensors
- Battery sensors
- Digital X-ray
- Computed tomography
- Sensor interface ASICs
- 概要
- USB 2.0 ペリフェラル コントローラー
- USB 3.2 ペリフェラル コントローラー
- USB ハブ コントローラー
- USB PD高電圧マイクロコントローラー
- USB-C AC-DC および DC-DC 充電ソリューション
- USB-C充電ポートコントローラー
- USB-Cパワーデリバリー コントローラー
- 概要
- AIROC™ オートモーティブワイヤレス
- AIROC™ Bluetooth®およびマルチプロトコル
- AIROC™ コネクトテッドMCU
- AIROC™ Wi-Fi + Bluetooth®コンボ
- AIROC™ Ultra-Wide Band Solutions
- 概要
-
32 ビット TriCore™ AURIX™ – TC2x
- 概要
- AURIX™ ファミリー – TC21xL
- AURIX™ファミリー – TC21xSC (ワイヤレス充電)
- AURIX™ ファミリー – TC22xL
- AURIX™ ファミリー – TC23xL
- AURIX™ ファミリー – TC23xLA (ADAS)
- AURIX™ ファミリー – TC23xLX
- AURIX™ ファミリー – TC264DA (ADAS)
- AURIX™ ファミリー – TC26xD
- AURIX™ ファミリー – TC27xT
- AURIX™ ファミリー – TC297TA (ADAS)
- AURIX™ ファミリー – TC29xT
- AURIX™ファミリー – TC29xTT (ADAS)
- AURIX™ ファミリー – TC29xTX
- AURIX™ TC2xx (エミュレーションデバイス)
-
32 ビット TriCore™ AURIX™ – TC3x
- 概要
- AURIX™ ファミリー TC32xLP
- AURIX™ ファミリー – TC33xDA
- AURIX™ ファミリー - TC33xLP
- AURIX™ ファミリー – TC35xTA (ADAS)
- AURIX™ ファミリー – TC36xDP
- AURIX™ ファミリー – TC37xTP
- AURIX™ ファミリー – TC37xTX
- AURIX™ ファミリー – TC38xQP
- AURIX™ ファミリー – TC39xXA (ADAS)
- TC39xXX/XP
- AURIX™ ファミリー – TC3Ex
- AURIX™ TC37xTE (エミュレーションデバイス)
- AURIX™ TC39xXE (エミュレーションデバイス)
- 32 ビット TriCore™ AURIX™ - TC4x
- 概要
- PSOC™ 4 Arm® Cortex® -M0/M0+
- PSOC™ 4 HV Arm® Cortex® -M0+
- PSOC™ 5 LP Arm® Cortex® -M3
- PSOC™ 6 Arm® Cortex®-M4 / M0+
- PSOC™マルチタッチタッチスクリーンコントローラー
- PSOC™ Control C3 Arm® Cortex®-M33
- 自動車用PSOC™ 4 Arm® Cortex®-M0/M0+
- PSOC™ Edge Arm® Cortex® M55/M33
- PSOC™ Control C1 Arm® Cortex®-M0
- 概要
- ボディ用32ビットTRAVEO™T2G Arm® Cortex®
- クラスター用の 32 ビット TRAVEO™ T2G Arm® Cortex®
- 概要
- 32ビットMCU
- レガシー8ビット/16ビットマイクロコントローラー
- その他レガシーマイクロコントローラー
- 32ビットFM Arm® Cortex® マイクロコントローラー
- センシングコントローラー
- 概要
- 整流ブリッジおよびACスイッチ
- CoolSiC™ ショットキーダイオード
- ダイオードベアダイ
- Si ダイオード
- サイリスタ/ダイオード パワーモジュール
- サイリスタソフトスタータモジュール
- サイリスタ / ダイオードディスク
- 概要
- 車載ゲートドライバ IC
- GaN HEMT用ゲートドライバIC
- SiC MOSFET用ゲートドライバIC
- ハーフブリッジ ゲートドライバIC
- ハイサイド ゲートドライバIC
- ガルバニック絶縁型ゲートドライバ
- レベルシフト
- ローサイド ゲートドライバIC
- 三相ゲートドライバIC
- トランスドライバIC
- 概要
- BLDCモータードライバ
- BDCモータードライバ
- ステッピングモーターおよびサーボモーター ドライバ
- MCU搭載モータードライバ
- MOSFETを使用したブリッジドライバ
- ゲートドライバIC
- 概要
- 車載用MOSFET
- デュアルMOSFET
- MOSFET(Si&SiC)モジュール
- NチャネルデプレッションモードMOSFET
- NチャネルMOSFET
- PチャネルMOSFET
- CoolSiC™ MOSFET
- 小信号/小電力MOSFET
- 概要
- IGBT モジュール
- MOSFET(Si&SiC)モジュール
- インテリジェント パワーモジュール (IPM)
- ダイオードとサイリスタ (Si/SiC)
- 車載用 IGBT および CoolSiC™ MOSFET モジュール
- 高密度パワーモジュール
- 概要
- 車載用トランシーバー
- 車載アプリケーション向けリニア電圧レギュレーター
- OPTIREG™ PMIC
- OPTIREG™スイッチャー
- OPTIREG™ システム ベーシス チップ (SBC)
- 概要
- EZ-USB™ CX3 MIPI CSI-2 to USB 5 Gbps カメラ コントローラー
- EZ-USB™ FX10 & FX5N USB 10Gbpsペリフェラルコントローラ
- EZ-USB™ FX20 USB 20 Gbpsペリフェラルコントローラー
- EZ-USB™ FX3 USB 5 Gbps ペリフェラル コントローラー
- EZ-USB™ FX3S USB 5 Gbps ペリフェラル コントローラー (ストレージ インターフェース付き)
- EZ-USB™ FX5 USB 5 Gbpsペリフェラルコントローラー
- EZ-USB™ SD3 USB 5 Gbps ストレージコントローラー
- EZ-USB™ SX3: FIFOインターフェースの USB 5 Gbps ペリフェラル コントローラー
- 概要
- EZ-PD™ CCG3 USB Type-Cポート コントローラーPD
- EZ-PD™ CCG3PA USB-C および PD
- EZ-PD™ CCG3PA-NFET USB-C PD コントローラー
- EZ-PD™ CCG7x シングルポート USB-Cパワーデリバリーおよび DC-DC コントローラー
- EZ-PD™ PAG1: 第 1 世代電源アダプター
- EZ-PD™ PAG2: 第 2 世代電源アダプター
- EZ-PD™ PAG2-PD USB-C PD コントローラー
- 概要
- EZ-PD™ ACG1F 1ポートUSB-Cコントローラー
- EZ-PD™ CCG2 USB Type-Cポート コントローラー
- EZ-PD™ CCG3PA車載用USB-Cおよびパワーデリバリーコントローラー
- EZ-PD™ CCG4 2 ポートUSB-CおよびPD
- EZ-PD™ CCG5デュアルポートおよび CCG5C シングルポート USB-C PDコントローラー
- EZ-PD™ CCG6 1ポート USB-C & PDコントローラー
- EZ-PD™ CCG6_CFP および EZ-PD™ CCG8_CFPデュアルシングルポート USB-C PD
- EZ-PD™ CCG6DFデュアルポートおよびCCG6SFシングルポートUSB-C PDコントローラー
- EZ-PD™ CCG7D車載用デュアルポートUSB-C PD + DC-DCコントローラー
- EZ-PD™ CCG7S車載用シングルポートUSB-C PDソリューション (DC-DCコントローラーおよびFET内蔵)
- EZ-PD™ CCG8デュアル シングル ポートUSB-C PD
- EZ-PD™ CMG1 USB-C EMCAコントローラー
- 拡張パワーレンジ (EPR) 搭載EZ-PD™ CMG2 USB-C EMCA
コアアーキテクチャ別に参照
主要テクノロジー別に参照
- 最新情報:
- 航空宇宙および防衛
- AIとデータセンター
- 自動車
- 通信
- 民生用電子機器
- ヘルスケアとライフスタイル
- 産業用アプリケーション
- セキュリティソリューション
- スマートホームとスマートビルディング
- ソリューション
- 概要
- 電源アダプターと充電器
- スマートテレビ向けの完全なシステムソリューション
- モバイルデバイスとスマートフォンソリューション
- ホームエンターテインメント アプリケーション向けの半導体ソリューション
- スマート会議システム
- ドローン
- AR and smart glasses
- 太陽光発電
- コンシューマーウェアラブル
- 家電製品
- 概要
- 電源アダプターと充電器
- 資産管理の追跡
- バッテリーの形成とテスト
- 電動フォークリフト
- バッテリー蓄電 (BESS)
- EV充電
- 高電圧ソリッドステート配電
- 産業用オートメーション
- 産業用モータードライブおよび制御
- 産業用ロボット
- LED 照明システムの設計
- 小型電気自動車ソリューション
- 送配電
- トラクション
- 無停電電源装置 (UPS)
- Digital health
- ロボティクス
- 風力
- 水電解槽
- 太陽光発電
- 産業用および医療用スイッチング電源 (SMPS)
- 電動工具
- 概要
- デバイス認証とブランド保護
- モノのインターネット (IoT) 向けの組み込みセキュリティ
- eSIM アプリケーション
- 公的身分証明書
- モバイルセキュリティ
- 決済ソリューション
- アクセス管理および発券ソリューション
- 概要
- 家庭用ロボット
- 空調システム (HVAC)
- ホームオートメーションとビルオートメーション
- PCアクセサリ
- ホームエンターテインメント アプリケーション向けの半導体ソリューション
- 概要
- アクティブサスペンションコントロール
- 車載用ブレーキング ソリューション
- 車載用ステアリング ソリューション
- シャーシ ドメイン制御
- 概要
- 自動車用バッテリーマネージメントシステム (BMS)
- EV充電
- 燃料電池車 (FCEV) ドライブトレインシステム
- 電気自動車用補助インバーター
- (商用車向けの) 高電圧補助インバーター
- EVトラクションインバーター
- トラクションインバーター (商用車)
- トラクションインバーター(電気二輪および三輪車)
- 電気自動車用高電圧DC-DCコンバーター
- 高電圧DC-DCコンバーター(商用車)
- 車載充電(電動商用車)
- 車載充電器 (OBC)
- 電動二輪車および三輪車用のオンボード充電(OBC)ソリューション
- 最新情報:
- デジタル ドキュメンテーション
- 評価ボード
- ファインダー & セレクション ツール
- プラットフォーム
- サービス
- オンライン シミュレーション
- ソフトウェア
- ツール
- パートナー
- インフィニオン フォー メーカーズ
- ユニバーシティ アライアンス プログラム
- 概要
- AIROC™ ソフトウェアとツール
- AURIX™のツールとソフトウェア
- 自動車ソフトウェア開発用のDRIVECORE™
- iMOTION™ ツールとソフトウェア
- インフィニオンのスマートパワースイッチおよびゲートドライバ ツールスイート
- MOTIX™ ソフトウェア&ツール
- OPTIGA™ ツールとソフトウェア
- PSOC™ ソフトウェアとツール
- TRAVEO™ ソフトウェアとツール
- XENSIV™ツールおよびソフトウェア
- XMC™ ツールとソフトウェア
- 概要
- AURIX™認証
- AURIX™開発ツール
- AURIX™組込みソフトウェア
- AURIX™マイクロコントローラーキット
- 概要
- CAPSENSE™コントローラー コンフィギュレーション ツール EZ-Click
- DC-DC統合POL電圧レギュレーター設定ツール – PowIRCenter
- EZ-USB™ SX3コンフィギュレーション ユーティリティ
- FM+ コンフィギュレーション ツール
- FMx設定ツール
- トランシーバーICコンフィギュレーション ツール
- USB EZ-PD™コンフィギュレーション ユーティリティ
- USB EZ-PD™コンフィギュレーション ユーティリティ
- USB EZ-USB™ HX3C Blaster Plusコンフィギュレーション ユーティリティ
- USB UARTコンフィギュレーション ユーティリティ
- XENSIV™タイヤ空気圧センサーのプログラミング
- 概要
- EZ-PD™ CCGx Dock ソフトウェア開発キット
- FMx Softune IDE
- ModusToolbox™ ソフトウェア
- PSOC™ ソフトウェア
- レーダー開発キット
- RUST
- USBコントローラーSDK
- ワイヤレス接続 Bluetooth メッシュヘルパー アプリケーション
- XMC™ DAVE™ソフトウェア
- 概要
- AIROC™ Bluetooth® Connect Appアーカイブ
- Cypress™ Programmerのアーカイブ
- EZ-PD™ CCGx 電力ソフトウェア開発キットのアーカイブ
- ModusToolbox™ ソフトウェアのアーカイブ
- PSOC™ Creatorのアーカイブ
- PSOC™ Designerのアーカイブ
- PSOC™ Programmerのアーカイブ
- USB EZ-PD™コンフィギュレーション ユーティリティ アーカイブ
- USB EZ-PD™ホストSDKのアーカイブ
- USB EZ-USB™ FX3のアーカイブ
- EZ-USB™ HX3PD コンフィギュレーション ユーティリティ
- WICED™ Smart SDKのアーカイブ
- WICED™ Studioのアーカイブ
- 最新情報:
- サポート
- トレーニング
- 開発者コミュニティ
- News
ビジネス&財務プレス
2026/07/13
ビジネス&財務プレス
2026/07/07
ビジネス&財務プレス
2026/07/06
ビジネス&財務プレス
2026/07/03
- 会社概要
- 私たちのストーリー
- イベント
- プレス
- 投資家向け情報
- 採用情報
- 品質
- 最新ニュース
ビジネス&財務プレス
2026/07/13
ビジネス&財務プレス
2026/07/07
ビジネス&財務プレス
2026/07/06
ビジネス&財務プレス
2026/07/03
ソフトウェア定義車両向けイーサネット カメラ ブリッジ
ソフトウェア定義車両向けイーサネット カメラ ブリッジ

ソフトウェア定義車両 (SDV) は自動車業界に新たな風を吹き込み、より安全で環境に優しく、魅力的な自動運転体験を提供します。イーサネットベースの車載ネットワーク (IVN) は、SDVに必要な接続性、セキュリティ、拡張性、制御を提供し、車両の実用性と運転体験を継続的に向上させる無線 (OTA) アップデートを可能にするとともに、OEMに新たな継続的な収益源をもたらします。
イーサネットは、現実世界のネットワークの需要を満たすために数十年にわたって進化し、正確な時間同期や確定的なスケジュール設定から、堅牢なアクセス制御や暗号化に至るまで、パフォーマンス、信頼性、セキュリティに対応する豊富な標準と機能を蓄積してきました。2014年頃から自動車業界でイーサネットの採用が始まり、帯域幅を拡張しながらケーブルの重量とコストを削減するシングルペアの車載用イーサネット (100BASE‑T1や1000BASE‑T1など) が推進され、ADAS、認知機能、インフォテインメントなどの高データレート機能向けの主要な車載バックボーンとして急速に普及しました。最新の自動車用イーサネットは、Time-Sensitive Networking (TSN) を活用して制限されたレイテンシを保証し、サービス指向の通信と診断をサポートし、MACsecや802.1Xなどのセキュリティ メカニズムを統合して、サイバー脅威を軽減し、新たな規制に準拠するのに役立ちます。
プロセッサ、コントローラー、アクチュエーター、センサー、カメラなど、自動車用デバイスすべてがイーサネット経由で通信すると、SDVの核となる機能、つまりネットワークを再プログラムし、高度なアプリケーションに合わせて主要な特性を調整する機能が実現されます。これを「イーサネット エンドツーエンド」と呼びます。
イーサネット機能により、柔軟性、拡張性、冗長性、制御性という、SDVにとって極めて重要な4つの主要属性が実現されます。
- 柔軟性: イーサネットは、ネットワーク内のデータフローを変更し、ドメイン、プロセッサ、およびその他の共有リソース (ストレージなど) 間でデバイス (カメラやセンサーなど) を共有する機能を提供します。
- 拡張性: これは、SDVのソフトウェアとハードウェアの両方に関係します。ソフトウェア駆動型機能アップデートでは、多くの場合、データと制御トラフィックのルーティング方法の再設定が必要になりますが、イーサネット スイッチでは、簡単な設定変更でこれを処理できます。SDVでは時間の経過とともにハードウェアも変更される可能性があり、多くの場合、新しいリンク速度やQoS要件に対応するためにネットワークの調整が必要になります。これらの更新は、イーサネット ベースのアーキテクチャでは簡単です。
- 冗長性: 機能安全要件を満たすには、ネットワークを保護するために、ミッションクリティカルなプロセッサとデバイス間のデータパスの両方を冗長性でカバーする必要があります。イーサネットのスイッチングおよびマルチパス機能により、IVNバックボーン全体でパスの多様性と負荷分散が可能になり、標準化されたハードウェアとプロトコルを通じてこの冗長性が実現されます。
- 制御性: リアルタイム診断とリンクレベルのデバッグにより、イーサネットの運用、管理、保守 (OAM) を使用して、チャネル品質、リンク マージン/劣化、EMCの脆弱性を追跡する継続的な自己診断と障害管理が可能になります。高度なAI/ML分析により、ネットワークの健全性をより正確に予測できるようになり、より高い安全目標の達成をサポートし、大きな経済的利益をもたらします。
前述のように、自動車用SDNの機能を最大限に活用するには、車内のほとんどのデバイスをイーサネット経由で接続する必要があります。今日の高度な車両アーキテクチャでは、高速バックボーンとしてはすでにイーサネットが使用されていますが、カメラ インターフェースは主に、低電圧差動信号 (LVDS) 物理層テクノロジーに基づく独自のポイントツーポイント (P2P) リンクのままです。最も一般的な2つは、GMSL (ADI) とFPD-Link (TI) です。MIPI A-PHYやASAなどの新しいソリューションはLVDSの代替として開発されていますが、依然としてポイントツーポイント ソリューションとして動作します。
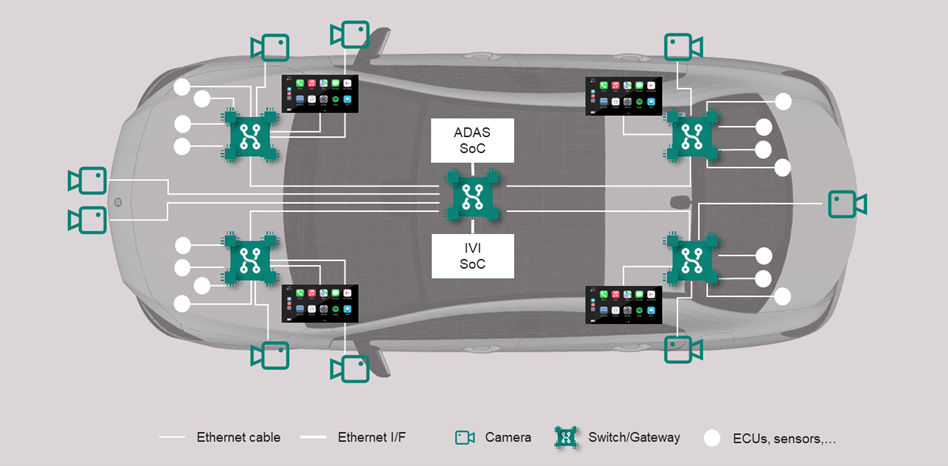
図1では、カメラ センサーを使用する2つのドメイン (ADASとインフォテインメント (IVI)) に重点を置いた、一般的なゾーン カー ネットワークの例を示します。
図1では、カメラ センサーを使用する2つのドメイン (ADASとインフォテインメント (IVI)) に重点を置いた、一般的なゾーン カー ネットワークの例を示します。
図1では、カメラ センサーを使用する2つのドメイン (ADASとインフォテインメント (IVI)) に重点を置いた、一般的なゾーン カー ネットワークの例を示します。
図に示すように、ほとんどのECU、センサー、およびその他のデバイス (小さな白い円でマークされています) はゾーン イーサネット バックボーンに接続し、その恩恵を受けています。ただし、カメラは依然として長いケーブルを使用して、SoCデバイスへの直接のポイントツーポイント リンクを使用しています。これらのP2P接続では、ADASおよびIVIドメイン間でカメラ ストリームを共有することが困難になります。さらに、このトポロジーは拡張性に欠け、冗長性も弱いです。カメラは1つのプロセッサに直接接続されているため、そのプロセッサに障害が発生すると、カメラ フィードへのアクセスが切断される可能性があります。
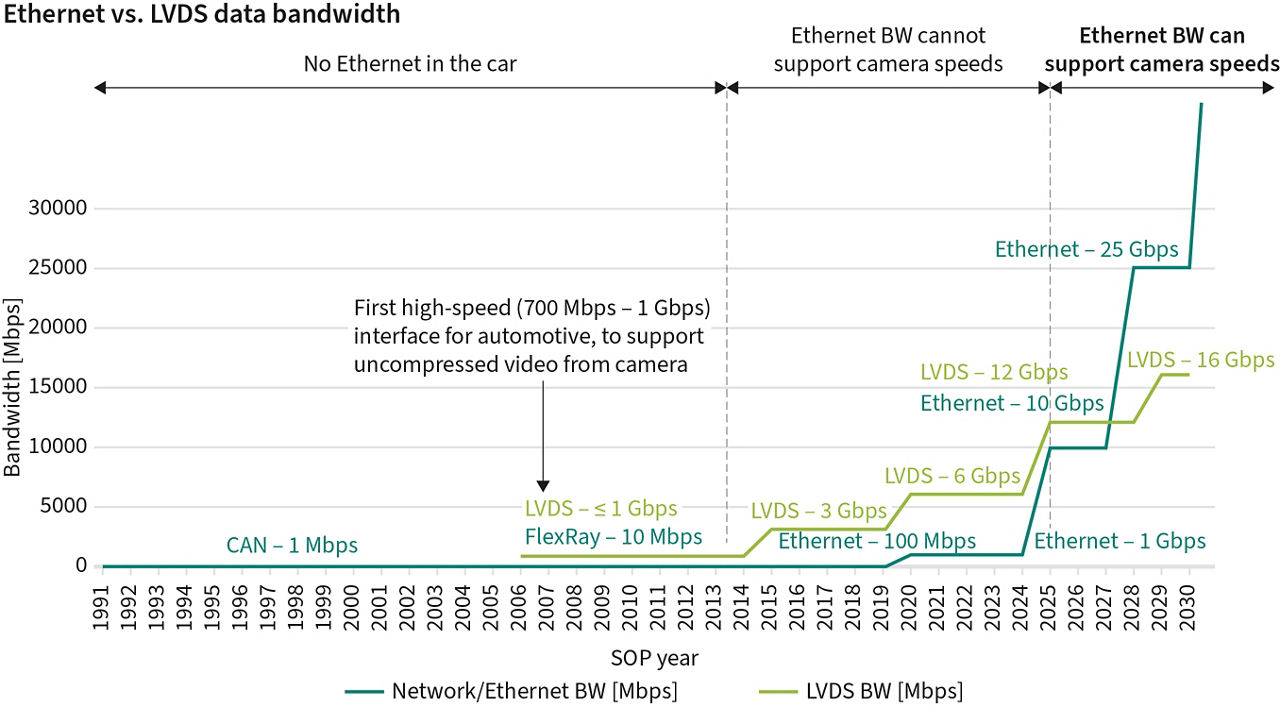
ポイントツーポイント (P2P) カメラ リンクの制限を克服する最善の方法は、カメラ側でビデオをイーサネットに変換することです。なぜ最初からイーサネットが使用されなかったのでしょうか?歴史的に、ADASカメラは、遅延を最小限に抑えて画像品質を維持するために圧縮を避けており、その結果、生のデータ レートが非常に高くなっています。長年にわたり、これらのカメラの速度は自動車用イーサネットが提供できる速度を超えていたため (下の図を参照)、OEMはGMSLやFPD-Link (LVDS) などの独自のシリアライザーに依存していました。LVDSベースのリンクは通常、世代ごとに約2倍ずつ拡張されますが、イーサネットは桁違いに大きくなる傾向があり、マルチギガの自動車用イーサネット PHY (2.5、5、10Gbs) の登場により、イーサネットもようやく追いつきました。今後、次世代カメラではイーサネットはさらに高速化 (最大25 Gbps) していきます。
これらのマルチギガPHYを使用すると、新しいクラスのブリッジ デバイスをセンサーに配置し、IEEE 1722オーディオ/ビデオ標準を使用してビデオをパッケージ化し、適切なタイミングと品質で車のイーサネット ネットワークを介して伝送できるようになります。
IEEE 1722は、時間に敏感なオーディオとビデオをイーサネット経由で送信し、ストリームが必要な時間と場所に到着するようにするための標準です。
このコンテキストでのIEEE 1722の動作は次のとおりです。
- ビデオの場合、カメラ ブリッジはAVTPの「トーカー」として機能し、ADASまたはIVI SoCは「リスナー」として機能します。AVTP (オーディオ ビデオ トランスポート プロトコル) は、IEEE 1722で定義され、イーサネット上のペイロード形式とタイミングを標準化する、時間に敏感なオーディオ/ビデオストリーム用のレイヤー2トランスポートです。
- 各ビデオフレームを、イーサネット フレームで伝送される AVTP プロトコル データ ユニットに分割し、識別と損失検出のために固有のストリームIDとシーケンス番号をタグ付けします。
- 各パケットには、車のクロックにロックされたプレゼンテーション タイムスタンプ (gPTP/IEEE 802.1ASに基づく) が含まれており、制限されたレイテンシと他のセンサー (レーダー、LIDARなど) との同期データを確保して、ドライバー アシスタンスに不可欠な正確なセンサー フュージョンを実現します。
- QoSは、VLAN優先順位とストリームを介して適用され、オプションでTSNシェーピング/スケジューリング (例: 802.1Qav/Qbv) も使用されるため、ビデオの帯域幅と優先順位が保証されます。
- ストリームはグループMACアドレスにマルチキャストすることができ、オプションでVLAN IDを使用することで、ソースで重複することなく複数のプロセッサが同じカメラ ビデオをサブスクライブできるようになります。
- 安全のため、冗長パスや信頼性のためのフレーム複製および削除 (IEEE 802.1CB) などの復元力機能により、リンクまたはスイッチに障害が発生した場合でもビデオの流れが維持されます。
さらに、IEEE 1722はSoCからカメラへの制御とGPIO信号をサポートします。
- IEEE 1722.1を使用して、コンピューターはカメラ ブリッジを検出し、その記述子を読み出し、接続を確立し、ビデオ ストリームとともに制御コマンド (開始/停止、露出、ゲイン、モードの変更) を送信します。
- GPIOは制御/イベント メッセージにマップされます。入力と出力はgPTPクロックにタイムスタンプを付けることができ、複数のカメラ間で正確かつ同期されたトリガーを実現できます。
- 制御トラフィックは優先順位付けされ (冗長パス/802.1CBを使用できます) 負荷がかかっている場合でも低遅延で信頼性の高い配信が保証されます。
つまり、IEEE 1722では、カメラのビデオを適切なタイミング、優先度、信頼性で車のイーサネット ネットワーク上を移動できる一方、IEEE 1722.1ではシンプルで同期された制御とGPIOが提供され、ドメイン間での共有と堅牢な冗長性が実現されます。
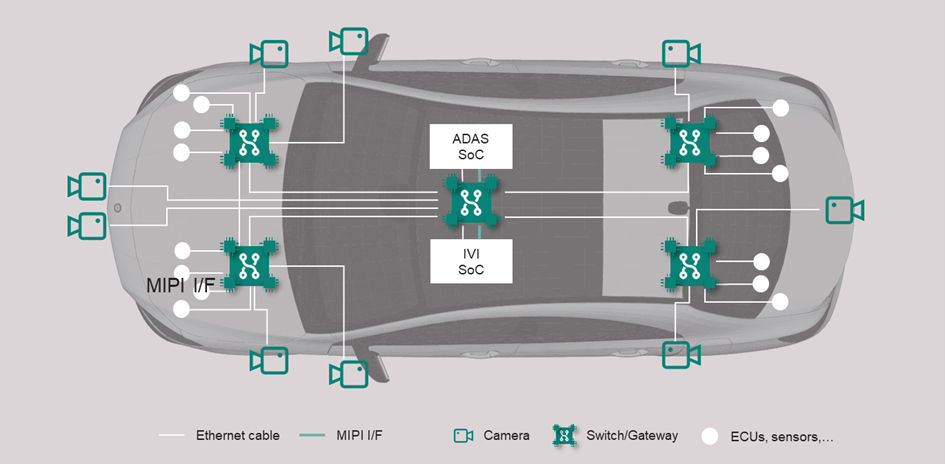
下図のように、カメラ出力をイーサネットに変換すると、中央スイッチまたは専用のイーサネット アグリゲータに接続できるようになり、複数のSoC間でストリームを共有できるようになります。コスト効率が良ければ、短くて軽量なケーブルを使用してカメラをゾーンスイッチに接続することもできます。
しかし、これは氷山の一角にすぎません。カメラ インターフェースの基盤となるテクノロジーがイーサネットであれば、これらのリンクは次のような他のすべてのIEEEイーサネット標準に自動的にアクセスできるようになります。
- スイッチングと仮想化 - IEEE 802.1
- セキュリティ – 認証と暗号化 – IEEE 802.1AE MACsec
- ネットワーク経由の時刻同期 – IEEE PTP 1588
- ケーブル経由電力供給 – IEEE PoDL 802.3bu
- オーディオ/ビデオ ブリッジング – IEEE 802.1 AVB/TSN
- エネルギー効率の高いイーサネット プロトコル (IEEE 802.3az) を使用した非対称伝送
- すべてのトポロジーをサポート: メッシュ、スター、リング、デイジーチェーン、ポイントツーポイント
さらに、カメラがイーサネットを出力する場合、カメラベンダーは、自動車業界で長年にわたって実証され受け入れられてきた、コンプライアンス、相互運用性、EMCなどを網羅した既存のイーサネットテスト インフラストラクチャ/テスト ハウスを活用できます。
次の図に示すように、車内イーサネットの次の段階では、ディスプレイや中央のハイエンド コンピューティング ユニット (SoC) など、すべての高データレート デバイスをネットワークに接続します。将来の自動車には2~5台の高解像度ディスプレイが搭載されると予想されており、現在ではLVDSなどの独自のポイントツーポイント リンクが使用されることが多いです。これらのディスプレイをイーサネットに移行すると、前述のイーサネット機能 (確定的タイミング、QoS、セキュリティ、診断など) のメリットを享受できると同時に、標準ベースのマルチベンダー エコシステムを通じてコストを削減できます。
イーサネットのエンドツーエンドを加速させる並行したトレンドとして、最大25 Gbpsまで拡張可能なネイティブの高速イーサネット ポートと、IEEE 1722ビデオ ストリームをデパケット化する専用ハードウェア エンジンを備えたSoCの出現があります。これにより、CPUの負荷が軽減され、待ち時間が短縮され、車載ネットワーク上でシームレスかつスケーラブルなメディア転送が可能になります。
SoC上のMIPI CSI-2をネイティブ25Gイーサネット ポートに置き換えると、パフォーマンス、アーキテクチャ、セキュリティ、スケーラビリティの面でいくつかの具体的な利点が得られます。
- 統合された帯域幅とより少ないピン: 単一の25Gイーサネット ポートで複数のカメラ ストリームを集約できるため、高速レーン/ピンが削減され、PCB/パッケージが簡素化され、長距離にわたる外部シリアライザーが不要になります。
- 共有可能でスケーラブル: イーサネットはマルチキャストを可能にするため、ADAS、IVI、およびロギングは同じストリームを使用できます。カメラの追加や再ルーティングは、ボードの再設計ではなくソフトウェア タスクになります。
- 決定論的でオーバーヘッドが低い: gPTP/TSNは厳密なタイミングを提供します。ISP/GPUへのDMAを使用したハードウェアベースのIEEE 1722デパケット化により、CPUの負荷が軽減され、レイテンシが削減されます。
最終的な結果: ネイティブ25Gイーサネットにより、SoCはプログラム可能なネットワーク内の高スループットの時間同期ノードとなり、ピン数とPCBの複雑さが軽減されるとともに、車両の寿命全体にわたってパフォーマンス、復元力、機能の追加と更新の容易さが向上します。
初期のマルチギガビット カメラ-イーサネット ブリッジでは、IEEE 802.3ch (2.5/5/10GBASE‑T1など) で定義された対称シングルペアPHYを使用していました。ただし、カメラ リンクは本質的に非対称です。つまり、高速ビデオがカメラからSoCに流れ、逆方向には低速の制御トラフィックのみが流れます。このトラフィック パターンに適合し、PHYのサイズと電力を削減するために、新しい標準IEEE 802.3dmでは、カメラ アプリケーション向けにカスタマイズされた非対称シングル ペア イーサネットPHYが導入されています。
IEEE 802.3dmは、カメラやディスプレイなど、トラフィックが主に一方向に流れるリンクに合わせて、非対称シングルペア イーサネットPHYを自動車に導入することに重点を置いています。802.3dmは、センサーからプロセッサ (カメラの場合) へのより高いダウンストリーム データレートと、制御およびステータス用のより低いアップストリーム レートをターゲットとしています。目標は、リターンパスを過剰にプロビジョニングしないことで、PHY電力、シリコン領域、およびコストを削減しながら、高解像度、低遅延のビデオに必要な帯域幅を提供することです。
技術的には、802.3dmは既存の802.3オートモーティブを基盤とし、単一のバランス ペア上での非対称動作に適合させます。これは、システム設計者が頼りにする動作、つまり全二重動作、自動車グレードのEMC堅牢性、レイヤー2でのTSNと互換性のある確定的遅延、Power over Data Line (PoDL) などのオプション機能を維持することを目的としています。また、STPケーブルと同軸ケーブルの両方をサポートする、一般的な自動車用距離および 15 mのハーネスも対象としています。802.3dmは、リンクレートを実際のトラフィック パターンに一致させることで、エッジでの電力を節約し、熱設計を簡素化し、画質やタイミングを犠牲にすることなくカメラ モジュールの小型化を実現します。
システムの観点から見ると、非対称PHYを標準化することで、ビジョン用の真のイーサネット エンドツーエンド アーキテクチャが可能になります。カメラとディスプレイをゾーン スイッチまたは中央スイッチに接続し、複数のECUとストリームを共有し、より広範なイーサネット エコシステム (スケジュール用の TSN、セキュリティ用のMACsec、時間同期用のPTP、電源用のPoDLまたはPower over Coax (PoC)) を活用できるようになります。これにより、独自のシリアライザーの必要性が減り、配線が軽減され、マルチベンダーのサプライ チェーンが促進されます。
現在の状況: 802.3dmは、ダウンストリーム速度2.5G、5G、10Gbps、アップストリーム速度100 Mbpsの実現を目標として開発中のアクティブなIEEE 802.3プロジェクトです。タスクフォースは、通常のIEEEプロセス (提案の評価、草案の作成、投票) を通じて、技術的なパラメーターと草案のテキストを改良しています。ドラフト2.0と投票フェーズの開始は2026年5月に予定されています。
エッジでカメラリンクをイーサネットに変換すると、SDVのエンドツーエンドのイーサネットが解放されます。ビデオと制御はIEEE 1722/1722.1でカプセル化されます。ストリームをADASとIVI間で共有可能にし、gPTP/TSNを介して正確に時間調整し、MACsecで保護し、成熟したOAMで観測可能にすると同時に、確立された自動車用イーサネット コンプライアンスとEMCテスト エコシステムのメリットも享受できます。ネイティブ10~25 GbpsイーサネットとIEEE 1722オフロードがSoCの標準となるにつれて、ネットワークは配線を変更するのではなくソフトウェアを通じてよりシンプルなスケーリングを実現します。IEEE 802.3dmの非対称シングルペアPHYの出現により、高速ダウンストリーム ビデオと軽量アップストリーム制御を組み合わせることで、カメラ リンクの電力、サイズ、コストがさらに最適化されます。これらの進歩により、独自のポイントツーポイント チェーンがプログラム可能で復元力のある標準ベースのファブリックに置き換えられ、配線と BOM が削減され、信頼性と安全性が向上し、車両の寿命全体にわたってOTA機能の提供が加速されます。
イーサネットは、現実世界のネットワークの需要を満たすために数十年にわたって進化し、正確な時間同期や確定的なスケジュール設定から、堅牢なアクセス制御や暗号化に至るまで、パフォーマンス、信頼性、セキュリティに対応する豊富な標準と機能を蓄積してきました。2014年頃から自動車業界でイーサネットの採用が始まり、帯域幅を拡張しながらケーブルの重量とコストを削減するシングルペアの車載用イーサネット (100BASE‑T1や1000BASE‑T1など) が推進され、ADAS、認知機能、インフォテインメントなどの高データレート機能向けの主要な車載バックボーンとして急速に普及しました。最新の自動車用イーサネットは、Time-Sensitive Networking (TSN) を活用して制限されたレイテンシを保証し、サービス指向の通信と診断をサポートし、MACsecや802.1Xなどのセキュリティ メカニズムを統合して、サイバー脅威を軽減し、新たな規制に準拠するのに役立ちます。
プロセッサ、コントローラー、アクチュエーター、センサー、カメラなど、自動車用デバイスすべてがイーサネット経由で通信すると、SDVの核となる機能、つまりネットワークを再プログラムし、高度なアプリケーションに合わせて主要な特性を調整する機能が実現されます。これを「イーサネット エンドツーエンド」と呼びます。
イーサネット機能により、柔軟性、拡張性、冗長性、制御性という、SDVにとって極めて重要な4つの主要属性が実現されます。
- 柔軟性: イーサネットは、ネットワーク内のデータフローを変更し、ドメイン、プロセッサ、およびその他の共有リソース (ストレージなど) 間でデバイス (カメラやセンサーなど) を共有する機能を提供します。
- 拡張性: これは、SDVのソフトウェアとハードウェアの両方に関係します。ソフトウェア駆動型機能アップデートでは、多くの場合、データと制御トラフィックのルーティング方法の再設定が必要になりますが、イーサネット スイッチでは、簡単な設定変更でこれを処理できます。SDVでは時間の経過とともにハードウェアも変更される可能性があり、多くの場合、新しいリンク速度やQoS要件に対応するためにネットワークの調整が必要になります。これらの更新は、イーサネット ベースのアーキテクチャでは簡単です。
- 冗長性: 機能安全要件を満たすには、ネットワークを保護するために、ミッションクリティカルなプロセッサとデバイス間のデータパスの両方を冗長性でカバーする必要があります。イーサネットのスイッチングおよびマルチパス機能により、IVNバックボーン全体でパスの多様性と負荷分散が可能になり、標準化されたハードウェアとプロトコルを通じてこの冗長性が実現されます。
- 制御性: リアルタイム診断とリンクレベルのデバッグにより、イーサネットの運用、管理、保守 (OAM) を使用して、チャネル品質、リンク マージン/劣化、EMCの脆弱性を追跡する継続的な自己診断と障害管理が可能になります。高度なAI/ML分析により、ネットワークの健全性をより正確に予測できるようになり、より高い安全目標の達成をサポートし、大きな経済的利益をもたらします。
前述のように、自動車用SDNの機能を最大限に活用するには、車内のほとんどのデバイスをイーサネット経由で接続する必要があります。今日の高度な車両アーキテクチャでは、高速バックボーンとしてはすでにイーサネットが使用されていますが、カメラ インターフェースは主に、低電圧差動信号 (LVDS) 物理層テクノロジーに基づく独自のポイントツーポイント (P2P) リンクのままです。最も一般的な2つは、GMSL (ADI) とFPD-Link (TI) です。MIPI A-PHYやASAなどの新しいソリューションはLVDSの代替として開発されていますが、依然としてポイントツーポイント ソリューションとして動作します。
図1では、カメラ センサーを使用する2つのドメイン (ADASとインフォテインメント (IVI)) に重点を置いた、一般的なゾーン カー ネットワークの例を示します。
図1では、カメラ センサーを使用する2つのドメイン (ADASとインフォテインメント (IVI)) に重点を置いた、一般的なゾーン カー ネットワークの例を示します。
図1では、カメラ センサーを使用する2つのドメイン (ADASとインフォテインメント (IVI)) に重点を置いた、一般的なゾーン カー ネットワークの例を示します。
図に示すように、ほとんどのECU、センサー、およびその他のデバイス (小さな白い円でマークされています) はゾーン イーサネット バックボーンに接続し、その恩恵を受けています。ただし、カメラは依然として長いケーブルを使用して、SoCデバイスへの直接のポイントツーポイント リンクを使用しています。これらのP2P接続では、ADASおよびIVIドメイン間でカメラ ストリームを共有することが困難になります。さらに、このトポロジーは拡張性に欠け、冗長性も弱いです。カメラは1つのプロセッサに直接接続されているため、そのプロセッサに障害が発生すると、カメラ フィードへのアクセスが切断される可能性があります。
ポイントツーポイント (P2P) カメラ リンクの制限を克服する最善の方法は、カメラ側でビデオをイーサネットに変換することです。なぜ最初からイーサネットが使用されなかったのでしょうか?歴史的に、ADASカメラは、遅延を最小限に抑えて画像品質を維持するために圧縮を避けており、その結果、生のデータ レートが非常に高くなっています。長年にわたり、これらのカメラの速度は自動車用イーサネットが提供できる速度を超えていたため (下の図を参照)、OEMはGMSLやFPD-Link (LVDS) などの独自のシリアライザーに依存していました。LVDSベースのリンクは通常、世代ごとに約2倍ずつ拡張されますが、イーサネットは桁違いに大きくなる傾向があり、マルチギガの自動車用イーサネット PHY (2.5、5、10Gbs) の登場により、イーサネットもようやく追いつきました。今後、次世代カメラではイーサネットはさらに高速化 (最大25 Gbps) していきます。
これらのマルチギガPHYを使用すると、新しいクラスのブリッジ デバイスをセンサーに配置し、IEEE 1722オーディオ/ビデオ標準を使用してビデオをパッケージ化し、適切なタイミングと品質で車のイーサネット ネットワークを介して伝送できるようになります。
IEEE 1722は、時間に敏感なオーディオとビデオをイーサネット経由で送信し、ストリームが必要な時間と場所に到着するようにするための標準です。
このコンテキストでのIEEE 1722の動作は次のとおりです。
- ビデオの場合、カメラ ブリッジはAVTPの「トーカー」として機能し、ADASまたはIVI SoCは「リスナー」として機能します。AVTP (オーディオ ビデオ トランスポート プロトコル) は、IEEE 1722で定義され、イーサネット上のペイロード形式とタイミングを標準化する、時間に敏感なオーディオ/ビデオストリーム用のレイヤー2トランスポートです。
- 各ビデオフレームを、イーサネット フレームで伝送される AVTP プロトコル データ ユニットに分割し、識別と損失検出のために固有のストリームIDとシーケンス番号をタグ付けします。
- 各パケットには、車のクロックにロックされたプレゼンテーション タイムスタンプ (gPTP/IEEE 802.1ASに基づく) が含まれており、制限されたレイテンシと他のセンサー (レーダー、LIDARなど) との同期データを確保して、ドライバー アシスタンスに不可欠な正確なセンサー フュージョンを実現します。
- QoSは、VLAN優先順位とストリームを介して適用され、オプションでTSNシェーピング/スケジューリング (例: 802.1Qav/Qbv) も使用されるため、ビデオの帯域幅と優先順位が保証されます。
- ストリームはグループMACアドレスにマルチキャストすることができ、オプションでVLAN IDを使用することで、ソースで重複することなく複数のプロセッサが同じカメラ ビデオをサブスクライブできるようになります。
- 安全のため、冗長パスや信頼性のためのフレーム複製および削除 (IEEE 802.1CB) などの復元力機能により、リンクまたはスイッチに障害が発生した場合でもビデオの流れが維持されます。
さらに、IEEE 1722はSoCからカメラへの制御とGPIO信号をサポートします。
- IEEE 1722.1を使用して、コンピューターはカメラ ブリッジを検出し、その記述子を読み出し、接続を確立し、ビデオ ストリームとともに制御コマンド (開始/停止、露出、ゲイン、モードの変更) を送信します。
- GPIOは制御/イベント メッセージにマップされます。入力と出力はgPTPクロックにタイムスタンプを付けることができ、複数のカメラ間で正確かつ同期されたトリガーを実現できます。
- 制御トラフィックは優先順位付けされ (冗長パス/802.1CBを使用できます) 負荷がかかっている場合でも低遅延で信頼性の高い配信が保証されます。
つまり、IEEE 1722では、カメラのビデオを適切なタイミング、優先度、信頼性で車のイーサネット ネットワーク上を移動できる一方、IEEE 1722.1ではシンプルで同期された制御とGPIOが提供され、ドメイン間での共有と堅牢な冗長性が実現されます。
下図のように、カメラ出力をイーサネットに変換すると、中央スイッチまたは専用のイーサネット アグリゲータに接続できるようになり、複数のSoC間でストリームを共有できるようになります。コスト効率が良ければ、短くて軽量なケーブルを使用してカメラをゾーンスイッチに接続することもできます。
しかし、これは氷山の一角にすぎません。カメラ インターフェースの基盤となるテクノロジーがイーサネットであれば、これらのリンクは次のような他のすべてのIEEEイーサネット標準に自動的にアクセスできるようになります。
- スイッチングと仮想化 - IEEE 802.1
- セキュリティ – 認証と暗号化 – IEEE 802.1AE MACsec
- ネットワーク経由の時刻同期 – IEEE PTP 1588
- ケーブル経由電力供給 – IEEE PoDL 802.3bu
- オーディオ/ビデオ ブリッジング – IEEE 802.1 AVB/TSN
- エネルギー効率の高いイーサネット プロトコル (IEEE 802.3az) を使用した非対称伝送
- すべてのトポロジーをサポート: メッシュ、スター、リング、デイジーチェーン、ポイントツーポイント
さらに、カメラがイーサネットを出力する場合、カメラベンダーは、自動車業界で長年にわたって実証され受け入れられてきた、コンプライアンス、相互運用性、EMCなどを網羅した既存のイーサネットテスト インフラストラクチャ/テスト ハウスを活用できます。
次の図に示すように、車内イーサネットの次の段階では、ディスプレイや中央のハイエンド コンピューティング ユニット (SoC) など、すべての高データレート デバイスをネットワークに接続します。将来の自動車には2~5台の高解像度ディスプレイが搭載されると予想されており、現在ではLVDSなどの独自のポイントツーポイント リンクが使用されることが多いです。これらのディスプレイをイーサネットに移行すると、前述のイーサネット機能 (確定的タイミング、QoS、セキュリティ、診断など) のメリットを享受できると同時に、標準ベースのマルチベンダー エコシステムを通じてコストを削減できます。
イーサネットのエンドツーエンドを加速させる並行したトレンドとして、最大25 Gbpsまで拡張可能なネイティブの高速イーサネット ポートと、IEEE 1722ビデオ ストリームをデパケット化する専用ハードウェア エンジンを備えたSoCの出現があります。これにより、CPUの負荷が軽減され、待ち時間が短縮され、車載ネットワーク上でシームレスかつスケーラブルなメディア転送が可能になります。
SoC上のMIPI CSI-2をネイティブ25Gイーサネット ポートに置き換えると、パフォーマンス、アーキテクチャ、セキュリティ、スケーラビリティの面でいくつかの具体的な利点が得られます。
- 統合された帯域幅とより少ないピン: 単一の25Gイーサネット ポートで複数のカメラ ストリームを集約できるため、高速レーン/ピンが削減され、PCB/パッケージが簡素化され、長距離にわたる外部シリアライザーが不要になります。
- 共有可能でスケーラブル: イーサネットはマルチキャストを可能にするため、ADAS、IVI、およびロギングは同じストリームを使用できます。カメラの追加や再ルーティングは、ボードの再設計ではなくソフトウェア タスクになります。
- 決定論的でオーバーヘッドが低い: gPTP/TSNは厳密なタイミングを提供します。ISP/GPUへのDMAを使用したハードウェアベースのIEEE 1722デパケット化により、CPUの負荷が軽減され、レイテンシが削減されます。
最終的な結果: ネイティブ25Gイーサネットにより、SoCはプログラム可能なネットワーク内の高スループットの時間同期ノードとなり、ピン数とPCBの複雑さが軽減されるとともに、車両の寿命全体にわたってパフォーマンス、復元力、機能の追加と更新の容易さが向上します。
初期のマルチギガビット カメラ-イーサネット ブリッジでは、IEEE 802.3ch (2.5/5/10GBASE‑T1など) で定義された対称シングルペアPHYを使用していました。ただし、カメラ リンクは本質的に非対称です。つまり、高速ビデオがカメラからSoCに流れ、逆方向には低速の制御トラフィックのみが流れます。このトラフィック パターンに適合し、PHYのサイズと電力を削減するために、新しい標準IEEE 802.3dmでは、カメラ アプリケーション向けにカスタマイズされた非対称シングル ペア イーサネットPHYが導入されています。
IEEE 802.3dmは、カメラやディスプレイなど、トラフィックが主に一方向に流れるリンクに合わせて、非対称シングルペア イーサネットPHYを自動車に導入することに重点を置いています。802.3dmは、センサーからプロセッサ (カメラの場合) へのより高いダウンストリーム データレートと、制御およびステータス用のより低いアップストリーム レートをターゲットとしています。目標は、リターンパスを過剰にプロビジョニングしないことで、PHY電力、シリコン領域、およびコストを削減しながら、高解像度、低遅延のビデオに必要な帯域幅を提供することです。
技術的には、802.3dmは既存の802.3オートモーティブを基盤とし、単一のバランス ペア上での非対称動作に適合させます。これは、システム設計者が頼りにする動作、つまり全二重動作、自動車グレードのEMC堅牢性、レイヤー2でのTSNと互換性のある確定的遅延、Power over Data Line (PoDL) などのオプション機能を維持することを目的としています。また、STPケーブルと同軸ケーブルの両方をサポートする、一般的な自動車用距離および 15 mのハーネスも対象としています。802.3dmは、リンクレートを実際のトラフィック パターンに一致させることで、エッジでの電力を節約し、熱設計を簡素化し、画質やタイミングを犠牲にすることなくカメラ モジュールの小型化を実現します。
システムの観点から見ると、非対称PHYを標準化することで、ビジョン用の真のイーサネット エンドツーエンド アーキテクチャが可能になります。カメラとディスプレイをゾーン スイッチまたは中央スイッチに接続し、複数のECUとストリームを共有し、より広範なイーサネット エコシステム (スケジュール用の TSN、セキュリティ用のMACsec、時間同期用のPTP、電源用のPoDLまたはPower over Coax (PoC)) を活用できるようになります。これにより、独自のシリアライザーの必要性が減り、配線が軽減され、マルチベンダーのサプライ チェーンが促進されます。
現在の状況: 802.3dmは、ダウンストリーム速度2.5G、5G、10Gbps、アップストリーム速度100 Mbpsの実現を目標として開発中のアクティブなIEEE 802.3プロジェクトです。タスクフォースは、通常のIEEEプロセス (提案の評価、草案の作成、投票) を通じて、技術的なパラメーターと草案のテキストを改良しています。ドラフト2.0と投票フェーズの開始は2026年5月に予定されています。
エッジでカメラリンクをイーサネットに変換すると、SDVのエンドツーエンドのイーサネットが解放されます。ビデオと制御はIEEE 1722/1722.1でカプセル化されます。ストリームをADASとIVI間で共有可能にし、gPTP/TSNを介して正確に時間調整し、MACsecで保護し、成熟したOAMで観測可能にすると同時に、確立された自動車用イーサネット コンプライアンスとEMCテスト エコシステムのメリットも享受できます。ネイティブ10~25 GbpsイーサネットとIEEE 1722オフロードがSoCの標準となるにつれて、ネットワークは配線を変更するのではなくソフトウェアを通じてよりシンプルなスケーリングを実現します。IEEE 802.3dmの非対称シングルペアPHYの出現により、高速ダウンストリーム ビデオと軽量アップストリーム制御を組み合わせることで、カメラ リンクの電力、サイズ、コストがさらに最適化されます。これらの進歩により、独自のポイントツーポイント チェーンがプログラム可能で復元力のある標準ベースのファブリックに置き換えられ、配線と BOM が削減され、信頼性と安全性が向上し、車両の寿命全体にわたってOTA機能の提供が加速されます。