VERANO Projekt
Ziel des Projektes VERANO ist die Erforschung einer verteilten, effizienten Datenverarbeitung unter Einschluss von KI-Methoden in digitalen Radar-Netzwerken für das vollautomatisierte Fahren mit einer optimalen Rechenlastverteilung zwischen Netzwerkkontrollern, Sensorknoten und Zentralrechner.

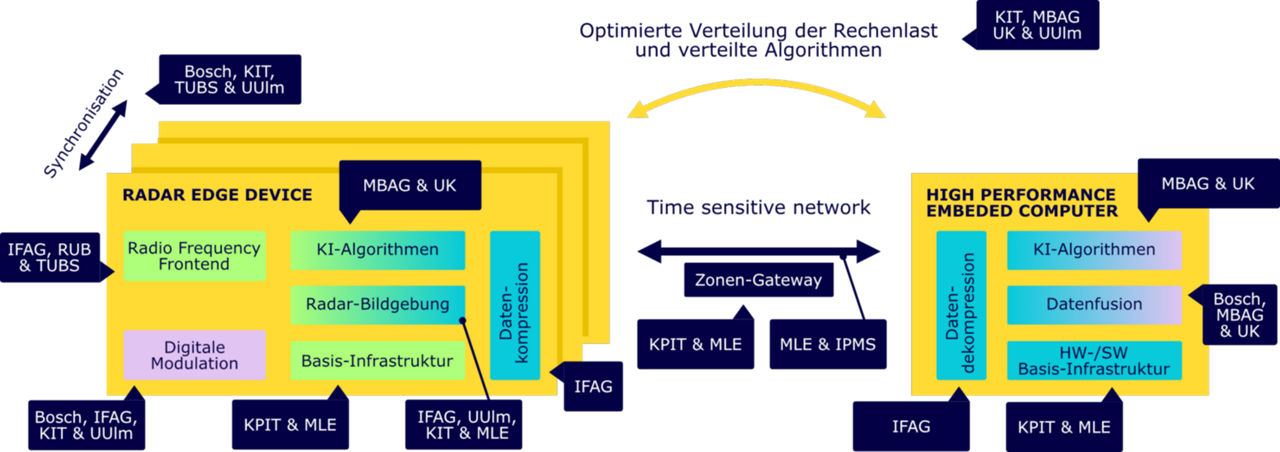
Schwerpunkte bilden dabei die weitgehende Digitalisierung aller systemrelevanten Funktionalitäten sowie die Erarbeitung einer anwendungsspezifischen optimalen Rechenlastverteilung zwischen Netzwerkkontrollern, Sensorknoten (Sensor-Edge) und Zentralrechner. Durch Einsatz modernster RFSoC FPGAs in den Sensorknoten sollen unterschiedliche Rechenschritte und KI-Algorithmen bei der Signalprozessierung implementiert werden. Die Optimierung der Rechenlastverteilung zwischen Sensorknoten und Zentralcomputer soll in Hinblick auf Applikationsanforderungen bzgl. „Bildqualität“, Kosten, Energieeffizienz, Zuverlässigkeit und Echtzeitfähigkeit erfolgen.
Die folgende Abbildung zeigt den möglichen Aufbau eines verteilten Sensornetzes mit mehreren synchronisierten Edge Devices, die eine gewisse Basisfunktionalität hinsichtlich Signalverarbeitung beinhalten, sowie einem zentralen High Performance Embedded Computer bzw. Steuergerät, in dem die Daten der einzelnen Edge Devices fusioniert und final ausgewertet werden.
Die Projektergebnisse sind auch auf andere Sensortypen (Kamera, Lidar usw.) und Applikationen wie z.B. Industrie 4.0, Logistik, Medizintechnik übertragbar. Durch Optimierung der Ressourceneffizienz wird ein wesentlicher Beitrag zur Nachhaltigkeit und zum Green Deal geleistet.
Zum Projektabschluss ist die Demonstration eines smarten Radar-Sensornetzes vorgesehen. Es wird ein vernetztes OFDM Radar in Laborumgebung aufgebaut. Als zweiter Demonstrator wird ein vereinfachtes, FCS basiertes Sensornetzwerk in einem Versuchsträger realisiert.
Die Verwertung der Ergebnisse ist über die gesamte im Projekt vertretene Lieferkette vorgesehen: Vom Tier 2 (HF-Bausteine und Mikrocontroller mit integrierten KI-Funktionalitäten), dem Tier 1 (neuartige, volldigitale Radarsensorsysteme) bis zum OEM (Fahrzeuge mit Autonomielevel 3 bis 5).
Arbeitspaket 1: Mercedes Benz AG
In Arbeitspaket 1 werden zunächst Anwendungsfälle (Use Cases) für die Umfelderfassung im assistierten und automatisierten Fahren bestimmt. Für diese wird jeweils untersucht, welchen Beitrag die Radarsensorik leisten sollte. Darunter werden Eckstein-Anwendungsfälle (Corner Use Cases) ausgewählt und priorisiert.
Aus allen Eckstein-Anwendungsfällen zusammengenommen leiten die Partner die Applikationsanforderungen an die Radarsensorik und die Highspeed-Vernetzung auf Basis von Ethernet TSN (time sensitive network) ab.
Im Anschluss erfolgt eine Auslegung der Sensor- und Antennenanordnung eines kohärenten, verteilten Radarnetzwerks. Es werden die Schlüsselanforderungen, insbesondere an die Phasenkohärenz und die zulässigen Phasenfehler zwischen den Radarsensoren als Eingangsgröße für AP2 definiert.
Darüber hinaus definieren die Partner die in diesem Vorhaben umzusetzenden Demonstratoren und Komponenten dieser. Dazu gehören:
- Ein FC-Demonstrator, der exemplarisch mindestens einen der Anwendungsfälle (Use Cases) darstellt.
- Die Architektur des verteilten Signalverarbeitungskonzepts
- Die Radar-Frontends
- Die Highspeed-Vernetzung auf Basis von TSN
Bei der Spezifikation dieser Demonstratoren und Komponenten wird darauf geachtet, dass sie sich zur Anwendung von KI-Algorithmen eignen.
Zum Abschluss des Vorhabens bestimmen die Partner auf Basis der gesammelten Erfahrungen Anforderungen für zukünftige Radarsensorik-Generationen als Beitrag zur Spezifikation zukünftiger Systeme und zur Ermittlung der Bedeutung der Radarsensorik innerhalb der Sensor-Modalitäten.
Dabei wird berücksichtigt, welche Anforderungen nach dem im Vorhaben erreichten Stand technisch umsetzbar sind.
Die Partner betrachten dabei insbesondere die Anforderungen an ein kohärentes Sensornetzwerk aufgeschlüsselt in Radar-Frontend, Radar-SoC, Sensorknoten und Netzwerkinfrastruktur.
Arbeitspaket 2: Robert Bosch GmbH
In AP2 wird das Gesamtkonzept und die Systemarchitektur für ein verteiltes digitales Radar im Fahrzeug entwickelt, implementiert und bewertet.
Zunächst werden die Kernelemente des Konzepts, die Synchronisation der Knoten und die Rechner/SW-Architektur, entwickelt. Bei der Synchronisation wird eine leitungsgebundene und eine nicht leitungsgebundene Synchronisation erstellt. Hier besteht die Herausforderung optimale Konzepte hinsichtlich Performance und Aufwand zu finden. Die sich daraus ergebenden Anforderungen an die Halbleiterkomponenten werden anschließend einem eigenen Unter-AP abgeleitet. Anschließend wird die Synchronisation der Radarknoten implementiert und mit Hilfe von Fast Chirp-Radaren verifiziert. Parallel dazu erfolgt die Umsetzung der Rechner und SW-Architektur mit Hilfe eines FPGAs. Darauf basierend erfolgt eine umfassende Bewertung der Konzepte hinsichtlich Leistungsfähigkeit, technischem Aufwand sowie den Kosten des Systems.
Arbeitspaket 3: Ruhr Universität Bochum
Im Vergleich zu den etablierten Einzel-Radarsensoren, ergeben sich für den Betrieb in einem Radar-Netzwerk anspruchsvolle zusätzliche Anforderungen. Zwar verwenden heutige Automobile bereits mehrere Sensoren, hier beschränkt sich die Synchronisation allerdings darauf, dass diese sich gegenseitig nicht stören. Im Rahmen von VERANO sollen mehrere Konzepte untersucht werden, die es ermöglichen, die Sensoren für gemeinsame bistatische Messungen zu betreiben. Für einfache inkohärente Messungen genügt es dabei, eine Synchronisation zu erreichen, die deutlich besser ist als die Signallaufzeit durch die Luft, so dass sub-Nanosekunden notwendig sind. Allerdings können erste voll-kohärente Messungen den Phasenbezug erhalten und damit alle Möglichkeiten der Radartechnik ausreizen. Dazu ist dann allerdings eine Synchronisation notwendig, die deutlich kürzer als eine Periodendauer ist, sodass hier sub-Pikosekunden notwendig sind.
Um die verschiedenen Konzepte der Synchronisation zu evaluieren, sollen im Rahmen dieses Arbeitspaketes modifizierte Radarchipsätze und Frontends für eine innovative Messplattform entworfen werden. Als Synchronisationsansatz kommen hier sowohl leitungsgebundene als auch leitungslose Konzepte in Betracht. Ferner ist zu untersuchen, ob diese Leitung zwingend als Hochfrequenzverbindung auszulegen ist, oder ob eine niederfrequente Verbindung ausreicht und gegebenenfalls mittels eines gewöhnlichen Automobil-Busses realisiert werden kann.
Die realisierten, anspruchsvollen Schaltungen können dabei von den neusten Entwicklungen von Infineons B12HFC-Technologie und dem eWLB-Package profitieren.
Arbeitspaket 4: Karlsruher Institut für Technologie
Vorbereitend für die Vernetzung der einzelnen Radarsensoren werden in AP4 die Grundlagen durch den Entwurf und die Implementierung der Signalverarbeitungs- und Synchronisationsmethoden für die Edge Devices gelegt. Diese müssen modular aufgebaut sein, sodass Teile der Prozessierungskette zwischen den Edge Devices und der Zentraleinheit verschoben werden können. Hierdurch kann analysiert werden, welche Teile der Radarsignalverarbeitung am effizientesten in den Edge Devices oder der Zentraleinheit durchgeführt werden und welche Datenraten sich dadurch ergeben. Ergänzend zu den klassischen, FFT-basierten Auswertealgorithmen sollen auch KI-basierte Methoden untersucht werden.
Ein für die Vernetzung elementarer Baustein stellt darüber hinaus die Synchronisation der Einzelsensoren dar, um frequenz-, zeit- und sogar phasensynchrone bi- und multistatische Radarmessungen durchführen zu können. Hierfür können sowohl digitale Verfahren auf Basis bereits bestehender Leitungen, zusätzliche Signalleitungen oder die Luftschnittstelle genutzt werden. Für alle drei Varianten sollen entsprechende Ansätze erarbeitet, simuliert und evaluiert werden. Die vielversprechendsten Ansätze sollen dann in einem Demonstrator implementiert und verifiziert werden. Je nach Synchronisationsverfahren sind unterschiedliche Genauigkeiten zu erwarten, die wiederum Einfluss auf die Radarbildgebung haben werden. Dieser Aspekt soll ebenfalls in AP4 analysiert werden.
Um multistatische Radarmessungen durchführen zu können, müssen sich die Sichtbereiche der Sensoren zumindest zum Teil überdecken. Zudem soll durch die verteilten Sensoren eine möglichst gute Winkelauflösung erreicht werden. Hierfür müssen sowohl geeignete Antennenarrays für die Einzelsensoren als auch darauf abgestimmte Algorithmen entwickelt werden, da bei Abständen von bis zu 1 m und Lücken im entsprechenden virtuellen Array Mehrdeutigkeiten und Nebenkeulen entstehen können, die die Winkelschätzung beeinträchtigen.
Zur Anbindung der Einzelsensoren an die Zentraleinheit werden geeignete Verfahren benötigt, um die zu übertragenden Daten komprimieren zu können. Wie groß der Komprimierungsfaktor sein muss, hängt einerseits von der Menge der zu übertragenden Daten und andererseits von der Größe der zur Verfügung stehenden Bandbreite zwischen den Edge Devices und der Zentraleinheit ab. Ersteres ist wiederum davon abhängig, welche Teile der Signalverarbeitungskette bereits auf dem Edge Device selbst ausgeführt werden und welche erst auf der Zentraleinheit. Entsprechend müssen auch die Komprimierungsverfahren an die jeweilige Verteilung angepasst werden. Das nach der Evaluation am besten geeignetste Kompressionsverfahren soll dann im Demonstrator, der in AP8 aufgebaut und messtechnisch analysiert wird, implementiert werden.
Arbeitspaket 5: Missing Link Electronics
Ziel des Arbeitspaket 5 ist die Erstellung eines initialen Laboraufbaus („Lab-Car“) zum Test und zur Demonstration für vernetzte Zonen-Gateways und High-Performance Embedded Computer Zentralrechner via High-Speed Ethernet TSN. Dieser Aufbau soll es ermöglichen, das Echtzeitverhalten und die zeitliche Synchronizität nachzuweisen. Das Ziel ist hier die Reduktion des „Jitter“ der Zeitsynchronisation.
Die Arbeitsinhalte in diesem Arbeitspaket bestehen folglich aus Entwurf und dem hardwareseitigen Aufbau der Versuchs- und Testumgebung. Dies beinhaltet zum einen den Aufbau der eigentlichen Hardware und zum anderen die Integration der Meß- und Prüfeinrichtungen, die Integration und die Verifikation von 3rd -party IP-Cores sowie dem Entwurf von Ethernet TSN mit 10GBit/s und Umsetzung für die TSN Endpunkte und TSN Switches. Abhängig von den Signalverarbeitungskonzepten aus AP4a und AP6 werden hier Anforderungen für den den Kommunikationslink zwischen Radarknoten, Zonen-Gateway und Zentralrechner definiert und berücksichtigt.
Im Folgenden werden im Rahmen dieses Arbeitspaketes Methoden zur hochpräzisen Zeitsynchronisation zwischen den Radarsensorknoten entwickelt und in den Versuchsaufbau integriert, getestet und validiert. In einem weiteren Schritt werden Härtungskonzepte für höchste Zuverlässigkeit, um beispielsweise Anforderungen an die funktionale Sicherheit erfüllen zu können, integriert, getestet und validiert. Hierbei handelt es sich vor allem um die Erforschung und Umsetzung von ISO26262 Härtungskonzepten für die TSN Netzwerkarchitektur, Erweiterung von Ethernet TSN für höchste Zuverlässigkeit mittels Frame Replication, IEEE 802.1CB (TSN Endpunkt und TSN Switch).
Arbeitspaket 6: Universität Ulm
In Arbeitspaket 6 liegt der Fokus auf der Signalverarbeitung sowie der KI-basierten Datenverarbeitung. Das Ziel ist, ein Konzept für die Signalverarbeitung im digitalen Radarnetzwerk zu entwerfen und zu bewerten. Dabei wird insbesondere auch untersucht, wie die Schritte der Signalverarbeitung zwischen den Edge-Devices und dem Zentralrechner aufgeteilt werden, wobei hierfür anhand der Performance, dem Informationsgehalt der Auswertung und der zu übertragenden Datenmengen Bewertungskriterien erarbeitet werden. Auf dieser Basis kann der Trade-Off bei der Algorithmikverteilung herausgearbeitet und demonstriert werden. Durch die Verteilung von KI-Modellen auf das Sensornetz sollen zudem erstmals Robustheitsaspekte, wie z. B. ausfallende Sensoren untersucht werden.
In Zentral- und Zonencomputern müssen die Daten verschiedener Edge-Devices fusioniert werden. Dabei gilt es, sowohl monostatische, als auch multistatische Messungen zu berücksichtigen. Die Datenfusion ermöglicht es, die von verschiedenen Sensoren gewonnenen Informationen zu kombinieren und so das Sensornetzwerk bestmöglich auszunutzen. Dabei werden insbesondere auch Fusionsansätze basierend auf verschiedenen Abstraktionsebenen der Informationsverarbeitung untersucht. So können beispielsweise KI-Methoden nicht nur auf erzeugte Punktwolken angewandt, sondern tiefer in die Sensoren integriert werden. Hieraus ergeben sich auch Anforderungen an die Datenübertragung. Um diese zu erfüllen, werden die Dateninterfaces und die Transportmethoden zwischen Edge-Device und Zentralrechner durch die Projektpartner analysiert und optimiert.
Durch die Datenfusion erhöhen sich so die zur Verfügung stehenden Informationen. Hierdurch werden insbesondere eine hochauflösende Winkelschätzung und somit ein präziseres Imaging erreicht. Dies bietet essentielle Vorteile für die Radar-basierte Objektdetektion mittels maschineller Lernverfahren. Für die Winkelschätzung müssen von den Projektpartnern angepasste Signalverarbeitungskonzepte und Algorithmen entworfen werden. Diese sollen es ermöglichen, die Subaperturen verschiedener Sensoren für eine gemeinsame Winkelschätzung zu verknüpfen. Die Herausforderungen liegen hierbei zum einen in der notwendigen Synchronisierung der Sensoren, die eine ausreichende Phasenkohärenz gewährleisten muss, und zum anderen in der Auslegung des Netzwerks und der Auswertung des tendenziell stark ausgedünnten virtuellen Arrays. Darüber hinaus wird die Echtzeitfähigkeit der Algorithmen überprüft.
Zusätzlich zur konventionellen Signalverarbeitung werden in AP6 KI-Modelle zur Komprimierung der Daten sowie zur Datenverarbeitung oder -interpretation untersucht. Dies kann beispielsweise einer effizienteren und zuverlässigeren Objekterkennung dienen. Auch hier liegt der Fokus auf einer geschickten Aufteilung der KI-Modelle auf Edge-Devices, Zonen- und Zentralcomputer, und dem Ausnutzen der durch das Netzwerk zur Verfügung stehenden Sensoren.
Arbeitspaket 7: Infineon Technologies AG
In Arbeitspaket 7 werden schwerpunktmäßig zwei Themen adressiert: Dies ist zum einen die Definition und SW-technische Realisierung von entsprechenden AUTOSAR-konformen Treibern für zukünftige Radar-MCUs und TSN relevanter Treiber. Ebenfalls wird in diesem Schwerpunktthema ein Konfigurationstool für eine FFT HW-Beschleuniger IP definiert und entwickelt.
Zum anderen werden zentralisierte und verteilte KI-Methoden entwickelt, evaluiert und hinsichtlich der Gesamtintegration in zukünftige Zonen-basierten E/E Architekturen ausgelegt und bewertet.
Entsprechende Meilensteine sichern die gesetzten Gesamtziele in den beiden zuvor beschriebenen Schwerpunktthemen ab.
Arbeitspaket 8: Infineon Technologies AG
Im Arbeitspaket 8 werden, basierend auf den Ergebnissen der anderen Arbeitspakete, Demonstratoren aufgebaut und evaluiert. Hierfür werden insbesondere 2 Labordemonstratoren (OFDM und FC) für die Radarnetzwerke erstellt und evaluiert.
Des Weiteren werden zonenbasierte Demonstratornetzwerke erstellt um eine Performanceanalyse daran durchzuführen, als auch die entwickelten KI-Methoden darauf anzuwenden und zu evaluieren.
Außerdem wird ein Testfahrzeug mit prototypischen Radarmodulen ausgestattet, um in Fahrversuchen auf einem Testgelände Daten für die Algorithmenentwicklung zu erfassen.
Arbeitspaket 9: Infineon Technologies AG
Dieses AP beinhaltet das Management des Gesamtprojektes, darunter fallen insbesondere das Controlling der Arbeitsfortschritte, eine fortlaufende Risikobewertung und die Ergreifung von Maßnahmen zur Risikominimierung, die Koordination der Arbeiten zwischen den Projektpartnern, die enge Abstimmung mit dem Projektträger sowie die Erstellung der Zwischenberichte und des Abschlussplans.
Fortschritt durch Zusammenarbeit: Das VERANO-Projekttreffen am KIT

Am 21. und 22. Mai 2025 versammelten sich führende Expertinnen und Experten aus Forschung und Industrie am Karlsruher Institut für Technologie (KIT) und im FZI House of Living Labs, um gemeinsam an den Zukunftstechnologien digitaler und energieeffizienter Radarnetzwerke zu arbeiten.
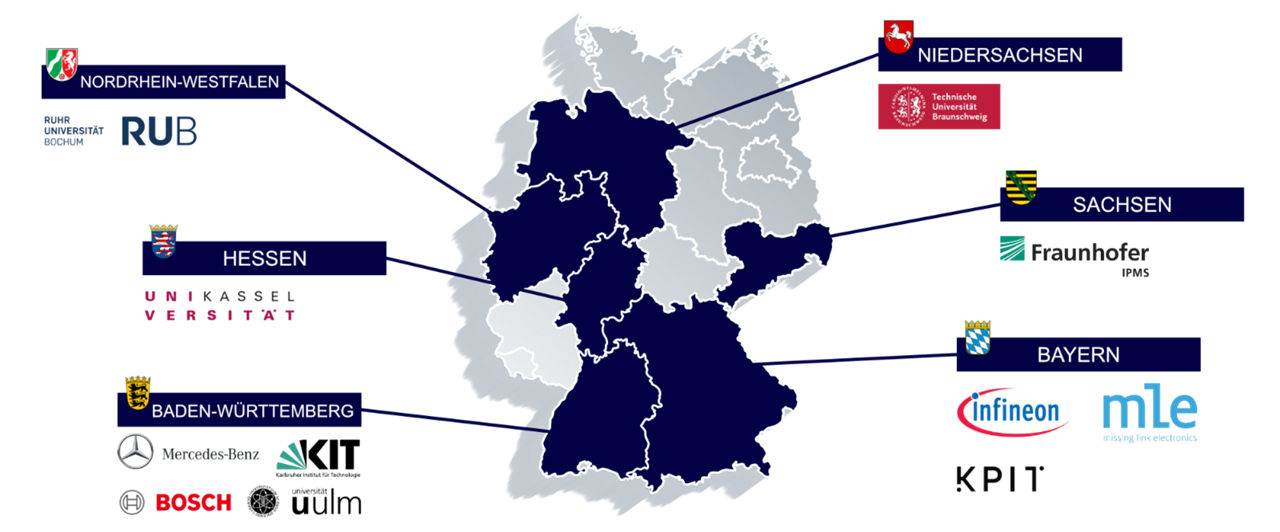
Unser Forschungsprojekt VERANO widmet sich der Entwicklung innovativer Lösungen für heterogene E/E-Fahrzeugarchitekturen und bringt zahlreiche Partner zusammen, darunter Bosch, Infineon, MB, KPIT, RUB, TUBS und viele weitere.
Spannende Themen und wegweisende Erkenntnisse
Die Agenda war gespickt mit hochaktuellen Entwicklungen:
- Edge Device Hardware – Fortschritte in der Demonstration und Anwendung innovativer Systeme
- KI-basierte Signalverarbeitung & Datenkompression – neue Ansätze für effizientere Radarverarbeitung
- Synchronisation und Time Sensitive Networks – Breitband-Datenübertragung in Echtzeit
- Netzwerk-Signalverarbeitung und Radar-SDK – gemeinsame Standards und Schnittstellen für verbesserte Datenfusion
Neben den technischen Diskussionen war auch das Networking ein wichtiger Bestandteil unseres Treffens. Das gemeinsame Mittagessen sowie die Besichtigung von Demonstratoren boten eine perfekte Gelegenheit zum interdisziplinären Austausch.
Auf dem Weg zur nächsten Meilenstein
Neben den aktuellen Fortschritten stand auch die Vorbereitung auf die Abschlussveranstaltung von OCTOPUS am 13. November 2025 im Fokus. Hier werden die gesammelten Erkenntnisse und Demonstratoren umfassend vorgestellt.
Ein herzliches Dankeschön an alle Teilnehmerinnen und Teilnehmer, die mit ihrem Fachwissen und Engagement zum Erfolg dieses Treffens beigetragen haben. Die Zukunft der Radartechnologie wird aktiv mitgestaltet – und VERANO spielt dabei eine entscheidende Rolle!
VERANO goes IEEE Radar Conference in Denver, 06.05.2024
Virtual Array Transformation for Large Apertures in Cooperative Automotive Radar Networks
Im Rahmen vom #VERANO-Projekt hat @Lukas Sigg von @KIT ein Paper bei der @IEEE Radar Conference in Denver veröffentlicht. In diesem Artikel präsentiert er eine fortschrittliche Methode, um große #Radarantennen mit großem Abstand zwischen den Subarrays in ein virtuelles, gleichmäßiges lineares #Array zu überführen. Solche großen Aperturen sind häufig in kooperativen #Automotive #Radarnetzwerken anzutreffen.
Um die Arrays zu transformieren, ist eine präzise Phasenkorrektur erforderlich. Die Berechnung dieser Phasen ist eines der Hauptthemen, die in diesem Artikel ausführlich behandelt werden. Die durchgeführten Simulationen und Messungen verdeutlichen die Vorteile eines solchen kooperativen #Netzwerks im Vergleich zu einem einzelnen Sensorknoten.
Lukas zeigt auch den Einfluss von Baseline-Fehlern auf die Genauigkeit der Transformation. Diese innovative Methode erfüllt die aktuellen Anforderungen der #Automobilindustrie, indem sie eine höhere Winkelauflösung ermöglicht, ohne die Anzahl der Antennenelemente eines einzelnen Sensors zu erhöhen. Danke Lukas für diese spannende Veröffentlichung!
Proklamation von Projekt VERANO

Working Session mit den schlauesten Köpfen der Branche!
Vom 25.-26. Mai 2023 fand unsere inspirierende Arbeitsgruppe zum Funding Projekt VERANO statt!
Ein herzliches Dankeschön an unseren Gastgeber, Jürgen Hasch von Bosch in Renningen.
Es war ein Treffen der besten Köpfe, um gemeinsam innovative Lösungen zu entwickeln, die unsere Welt verändern werden.
Nicht nur wir haben die Gelegenheit genutzt, unsere Fachkenntnisse zu teilen, sondern haben auch das Potenzial der Zusammenarbeit voll ausgeschöpft. Es ist erstaunlich, wie viel wir erreichen können, wenn wir unsere Kräfte bündeln und gemeinsam an einem Ziel arbeiten.
Ein großes Dankeschön an alle Teilnehmerinnen und Teilnehmer für ihre leidenschaftliche Hingabe und ihren Beitrag zu unserer Working Session! Eure Beiträge waren von unschätzbarem Wert und haben dazu beigetragen, dass das Projekt neue Horizonte erreicht.
Hier sind einige der erstaunlichen Statements, die während unserer Diskussionen gemacht wurden:
"Die Zusammenarbeit zwischen unterschiedlichen Fachgebieten bringt neue Perspektiven hervor und beschleunigt den Fortschritt."
"Projekt VERANO hat das Potenzial, das Leben von Millionen von Menschen zu verbessern. Lassen Sie uns gemeinsam an diesem Ziel arbeiten!"
"Nur durch den Austausch von Wissen und Erfahrungen können wir die größten Herausforderungen unserer Zeit bewältigen."
Wir sind stolz auf die Ergebnisse unserer Working Session und werden weiterhin daran arbeiten, die Vision vom Projekt VERANO in die Realität umzusetzen. Bleiben Sie gespannt auf weitere Updates und seien Sie Teil unserer Reise zur Veränderung!
VERANO PROJEKTTREFFEN NOV. 2023 am KIT
Vom 20. bis 21. November 2023 fand in Karlsruhe unser zweites Projekttreffen sowie spezialisierte Workshops statt. Zum ersten Mal hatte das Team die Gelegenheit, den Projekt-Demonstrator und das Demonstrator Fahrzeug in Augenschein zu nehmen. Letzteres wurde vor allem durch die Bemühungen von Maximilian Steiner von Mercedes realisiert.
VERANO-Review Mai 2024 an der Uni Bochum

Im Mai fand in Bochum an der Universität Bochum das Projekt-Review für das Projekt VERANO statt. Bei diesem Review kamen alle Projektpartner zusammen, um den aktuellen Stand ihrer Arbeitsprojekte zu präsentieren. Das Projekt VERANO, das von Infineon und mehreren Partnern durchgeführt wird, zielt darauf ab, innovative Radar-Technologien für die Automobilindustrie zu entwickeln und zu implementieren.
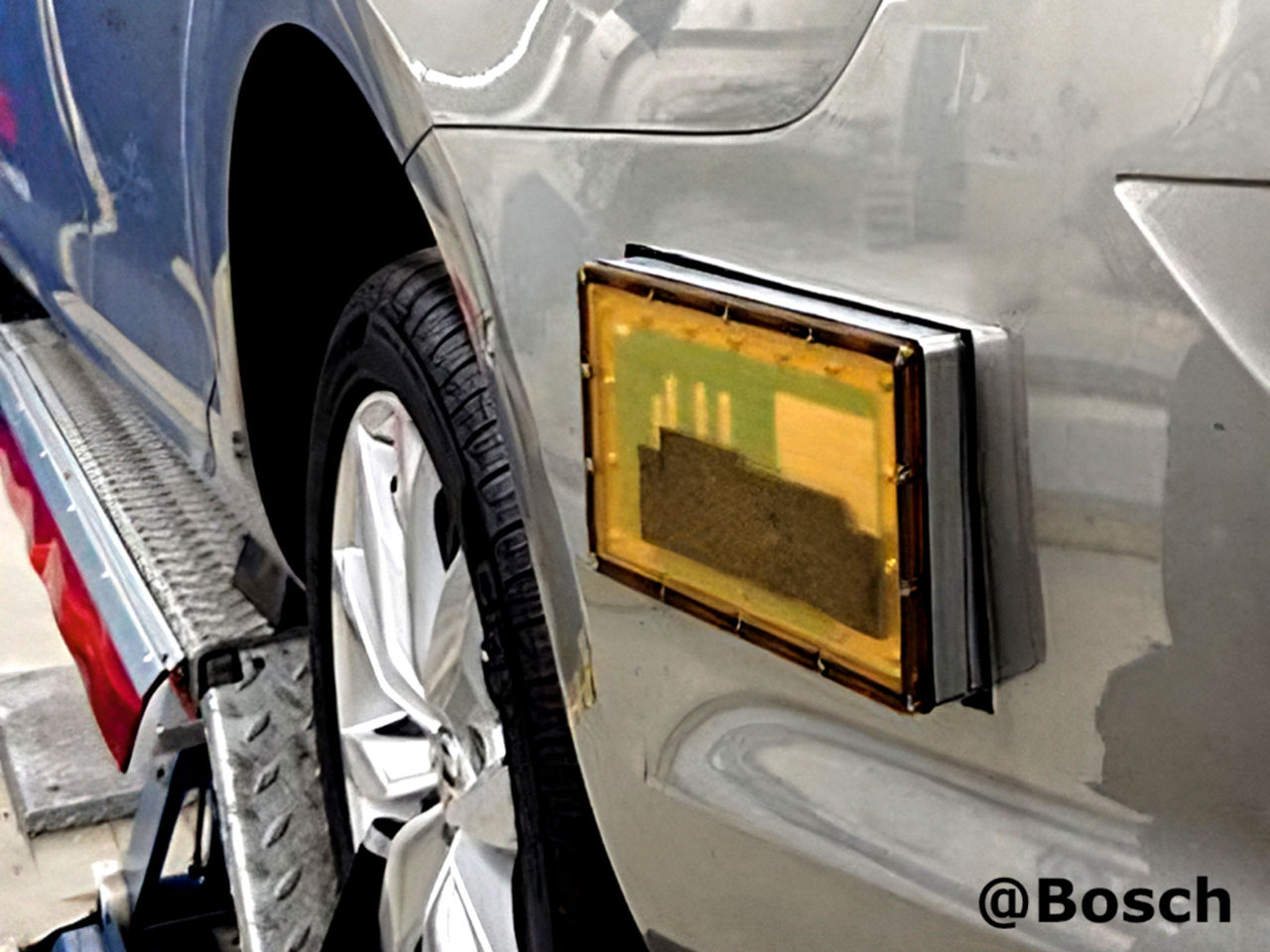
Während des Reviews präsentierten die Partner ihre Fortschritte und stellten verschiedene Hardware-Demonstratoren vor. Besonders hervorzuheben war das Auto von Mercedes, das mit den für VERANO eingebauten Radar-Sensoren ausgestattet war. Diese Sensoren sind in der Lage, hochpräzise Umgebungsdaten zu erfassen und tragen somit erheblich zur Sicherheit und Effizienz moderner Fahrzeuge bei.
Zusätzlich zu dem Radar-gestützten Fahrzeug wurden auch einzelne Radarmodule vorgestellt. Diese Module demonstrierten verschiedene technologische Fortschritte und Einsatzmöglichkeiten, die im Rahmen des Projekts entwickelt wurden. Sie zeigten eindrucksvoll, wie weit die Entwicklungen im Bereich der Radar-Technologie bereits fortgeschritten sind und welche zukünftigen Anwendungen möglich sind.
Das Review in Bochum bot den Teilnehmern eine wertvolle Gelegenheit, sich über den aktuellen Stand des Projekts auszutauschen, Feedback zu geben und gemeinsame Ziele für die kommenden Monate zu definieren. Insgesamt war das Treffen ein wichtiger Meilenstein für das Projekt VERANO und unterstrich die Bedeutung der Zusammenarbeit zwischen Industrie und Wissenschaft, um innovative Lösungen für die Mobilität der Zukunft zu schaffen.
VERANO OCTOPUS-Treffen 17.09.2024

Ein inspirierendes Vernetzungstreffen der OktopusGruppe liegt hinter uns. Die Diskussionen mit den Kollegen der anderen Projekte haben uns neue Perspektiven eröffnet und uns motiviert!
Gemeinsam mit den Kollegen Maximilian Steiner, Rossen Michev und Hasan Hüseyin Tekin haben wir im Team unser aktuelles Projekt VERANO vorgestellt.
Wir sind unglaublich stolz auf die geleistete Arbeit und die Leidenschaft, mit der jeder an diesem Projekt beteiligt ist.
Ein herzliches Dankeschön an das BMBF für die fantastische Organisation des Tages.
VERANO Projekttreffen Uni Ulm Oktober 2024

VERANO - 4. Projekttreffen erfolgreich abgeschlossen!
Wir freuen uns, dass das 4. Projekttreffen von #VERANO ein voller Erfolg war. Gastgeber waren die Universität Ulm und Missing Link Electronics. Ein herzliches Dankeschön an Prof. Dr.-Ing. Christian Waldschmidt, Leiter des Instituts für Mikrowellentechnik, sowie an Dr. Endric Schubert, Co-Founder & CTO, und Ulrich Langenbach, Director Engineering bei MLE, für die hervorragende Organisation.
Ein besonderes Highlight war die spannende #Laborführung bei Missing Link Electronics, die uns tiefere Einblicke in die neuesten Entwicklungen ermöglicht hat. Die Zusammenarbeit zwischen der Uni Ulm und MLE zeigt eindrucksvoll, wie Forschung und Praxis Hand in Hand gehen können.
Wir freuen uns auf die nächsten Schritte und die weitere Zusammenarbeit in diesem zukunftsweisenden Projekt!
Veröffentlichungen im Rahmen von VERANO
Vorgängerprojekt Radar4FAD
VERANO rollt auf den Straßen der Innovation

VERANO ist eine bahnbrechende Initiative, die die Grenzen der Radartechnologie neu definiert. In Zusammenarbeit mit allen Partnern, u.a. auch Mercedes Benz haben wir einen Demonstrator entwickelt, der die beeindruckenden Fähigkeiten dieser Technologie zeigt.
Und jetzt zur spannendsten Neuigkeit: Unser Fahrzeugdemonstrator ist nun mit dem Branding von Verano foliert! Dieser Schritt symbolisiert nicht nur unsere starke Partnerschaft mit Mercedes Benz, sondern auch unseren Stolz auf die Errungenschaften, die wir im Rahmen dieses Projekts erzielt haben.
Bleiben Sie dran, um mehr über die aufregenden Entwicklungen im Projekt Verano zu erfahren. Die Zukunft der Radartechnologie beginnt hier!
VERANO MLE Demonstratorvorstellung
Präzision in Echtzeit: Ulrich Langenbach präsentiert den White Rabbit Demonstrator für das VERANO-Projekt
Wir freuen uns, euch Ulrich Langenbach vorstellen zu dürfen. Ulrich ist ein erfahrener Experte bei Missing Link Electronics, wo er als Senior Manager tätig ist. Sein Fokus liegt auf der Entwicklung innovativer Technologien im Bereich der eingebetteten Systeme.
Aktuell arbeitet Ulrich und die MLE maßgeblich am Projekt VERANO mit. Gemeinsam entwickeln wir Lösungen für hochpräzise und zuverlässige Netzwerksynchronisation in Echtzeitsystemen. In diesem Video gibt er einen exklusiven Einblick in den Demonstrator, der auf der White Rabbit-Technologie basiert und im Rahmen des Projekts VERANO entwickelt wurde.
Jetzt ansehen und mehr erfahren!
#Innovation #Technologie #WhiteRabbit #VERANO #Networking #Forschung #Zusammenarbeit
VERANO Demonstrator BOSCH
Die Zukunft der Automobilradar-Technologie: Der Bosch Radar-Demonstrator
Automotive Radar ist entscheidend für die Verkehrssicherheit. Mit dem Fortschritt in Richtung automatisiertes Fahren müssen herkömmliche Radarsysteme jedoch mehr bieten. Die Lösung liegt in verteilten Radarsensoren. In diesem Blogbeitrag werden wir die neuesten Entwicklungen in der Radartechnologie von Bosch untersuchen und wie diese Technologien die Zukunft des Fahrens gestalten werden.
Die Notwendigkeit verteilter Radarsensoren
Standardradarsysteme sind nicht mehr ausreichend, um den Anforderungen des automatisierten Fahrens gerecht zu werden. Die Idee hinter verteilten Radarsensoren ist einfach: Durch die räumliche Verteilung kleinerer Sensoren rund um das Fahrzeug schaffen wir eine große effektive Antennenöffnung. Dies ermöglicht eine hohe Auflösung, ohne das Design des Fahrzeugs zu beeinträchtigen.
Wie funktionieren verteilte Radarsensoren?
Verteilte Radarsensoren arbeiten, indem sie die Daten von mehreren Sensoren zusammenführen, um ein vollständiges Bild der Umgebung zu erstellen. Diese Methode verbessert die Genauigkeit und Zuverlässigkeit der Objekterkennung und -verfolgung erheblich. Durch die Kombination der Informationen von verschiedenen Sensoren kann das System auch unter schwierigen Bedingungen, wie z.B. bei schlechten Lichtverhältnissen oder ungünstigen Wetterbedingungen, effektiv arbeiten.
Das Verano-Projekt: Fortschritte in der Radartechnologie
Das Verano-Projekt treibt diese Technologien voran. Es konzentriert sich auf effiziente Datenverarbeitung, Synchronisation und die optimale Verteilung der Rechenlast zwischen Netzwerkcontrollern, Sensorknoten und zentralen Computern. Diese Forschungsinitiative hat das Ziel, die Fähigkeiten von Radarsystemen weiter zu verbessern und sie für die Anforderungen des automatisierten Fahrens fit zu machen.
Effiziente Datenverarbeitung
Ein wesentlicher Aspekt des Verano-Projekts ist die effiziente Datenverarbeitung. Radarsysteme erzeugen große Mengen an Daten, die schnell verarbeitet werden müssen, um eine Echtzeit-Reaktion zu ermöglichen. Bosch arbeitet an Algorithmen, die diese Daten effizient analysieren und interpretieren, um eine präzise Entscheidungsfindung zu gewährleisten.
Synchronisation der Sensoren
Ein weiterer wichtiger Punkt ist die Synchronisation der verschiedenen Sensoren. Um eine präzise Wahrnehmung der Umgebung zu gewährleisten, müssen die Sensoren genau abgestimmt arbeiten. Bosch erforscht Methoden zur Synchronisation der Sensordaten, um sicherzustellen, dass die Informationen in Echtzeit und ohne Verzögerung verarbeitet werden.
Verteilung der Rechenlast
Die Verteilung der Rechenlast ist entscheidend für die Leistung des Radarsystems. Bosch entwickelt Technologien, die es ermöglichen, die Rechenlast effizient zwischen verschiedenen Komponenten des Systems zu verteilen. Dies führt zu einer besseren Leistung und einer höheren Effizienz des gesamten Systems.
Der Bosch Software Defined Digital Radar Demonstrator
Ein bedeutender Fortschritt in der Radartechnologie ist der Bosch Software Defined Digital Radar Demonstrator. Dieser Demonstrator besteht aus vier Hauptkomponenten:
- RF SoC Modul: Dieses Modul ist das Herzstück des Radarsystems und ermöglicht die Signalverarbeitung.
- Backend: Das Backend kümmert sich um die Datenverarbeitung und -analyse.
- Dalo-Generierung: Diese Komponente ist für die Erstellung der Radarinformationen verantwortlich.
- Frontend: Das Frontend ermöglicht die Benutzerinteraktion und das Management der Radardaten.
Dieser Demonstrator zeigt, wie Bosch innovative Techniken in der Radartechnologie implementiert, um die Anforderungen des automatisierten Fahrens zu erfüllen.
Die Zukunft der Radartechnologie
Die Entwicklungen in der Radartechnologie von Verano sind vielversprechend. Mit dem Fokus auf verteilte Radarsensoren und die Optimierung der Datenverarbeitung wird die Radartechnologie nicht nur sicherer, sondern auch effizienter. Diese Fortschritte sind entscheidend für die Schaffung einer sicheren und zuverlässigen automatisierten Fahrumgebung.
Schlussfolgerung
Wir sind kontinuierlich bestrebt, Technologien zu entwickeln, die das Leben verbessern. Mit dem Bosch Software Defined Digital Radar Demonstrator und dem Verano-Projekt zeigt das Unternehmen, wie moderne Radartechnologien die Automobilindustrie revolutionieren können. Die Zukunft des Fahrens ist digital, und Bosch ist an vorderster Front dabei.
Innovationen im VERANO-Projekt ausgezeichnet

Im Rahmen der diesjährigen European Microwave Week in Paris hat unser Partner Rossen Michev von Bosch einen bedeutenden Erfolg erzielt: Der Demonstrator für das Projekt VERANO mit dem Titel "A Compact 77 GHz 4x4 MIMO Stepped Frequency OFDM Radar" wurde mit dem Best Paper Award auf der European Radar Conference (EuRAD) ausgezeichnet.
Der vorgestellte Demonstrator ist ein digital-moduliertes Edge-Device, das neue Möglichkeiten für End-to-End-Algorithmen in den Bereichen Synchronisation und kognitive Operationen eröffnet. Dies wird durch die rein softwaredefinierte Wellenform-Generierung ermöglicht. Dadurch können innovative Ansätze entwickelt und die Leistung verschiedener Synchronisationsmechanismen, die im Projekt untersucht werden, umfassend evaluiert und verglichen werden.
Dieser Erfolg ist ein Beleg für die Innovationskraft und das Potenzial des VERANO-Projekts, wegweisende Technologien zu entwickeln, die in der Praxis neue Maßstäbe setzen. Wir danken allen Mitwirkenden und Partnern, die diesen Fortschritt durch ihre Arbeit und ihr Engagement ermöglicht haben.
Das VERANO-Projekt steht exemplarisch für die Verbindung von Forschung und Technologie, um zukunftsorientierte Lösungen für die Herausforderungen von morgen zu schaffen.
Schwerpunkte bilden dabei die weitgehende Digitalisierung aller systemrelevanten Funktionalitäten sowie die Erarbeitung einer anwendungsspezifischen optimalen Rechenlastverteilung zwischen Netzwerkkontrollern, Sensorknoten (Sensor-Edge) und Zentralrechner. Durch Einsatz modernster RFSoC FPGAs in den Sensorknoten sollen unterschiedliche Rechenschritte und KI-Algorithmen bei der Signalprozessierung implementiert werden. Die Optimierung der Rechenlastverteilung zwischen Sensorknoten und Zentralcomputer soll in Hinblick auf Applikationsanforderungen bzgl. „Bildqualität“, Kosten, Energieeffizienz, Zuverlässigkeit und Echtzeitfähigkeit erfolgen.
Die folgende Abbildung zeigt den möglichen Aufbau eines verteilten Sensornetzes mit mehreren synchronisierten Edge Devices, die eine gewisse Basisfunktionalität hinsichtlich Signalverarbeitung beinhalten, sowie einem zentralen High Performance Embedded Computer bzw. Steuergerät, in dem die Daten der einzelnen Edge Devices fusioniert und final ausgewertet werden.
Die Projektergebnisse sind auch auf andere Sensortypen (Kamera, Lidar usw.) und Applikationen wie z.B. Industrie 4.0, Logistik, Medizintechnik übertragbar. Durch Optimierung der Ressourceneffizienz wird ein wesentlicher Beitrag zur Nachhaltigkeit und zum Green Deal geleistet.
Zum Projektabschluss ist die Demonstration eines smarten Radar-Sensornetzes vorgesehen. Es wird ein vernetztes OFDM Radar in Laborumgebung aufgebaut. Als zweiter Demonstrator wird ein vereinfachtes, FCS basiertes Sensornetzwerk in einem Versuchsträger realisiert.
Die Verwertung der Ergebnisse ist über die gesamte im Projekt vertretene Lieferkette vorgesehen: Vom Tier 2 (HF-Bausteine und Mikrocontroller mit integrierten KI-Funktionalitäten), dem Tier 1 (neuartige, volldigitale Radarsensorsysteme) bis zum OEM (Fahrzeuge mit Autonomielevel 3 bis 5).
Arbeitspaket 1: Mercedes Benz AG
In Arbeitspaket 1 werden zunächst Anwendungsfälle (Use Cases) für die Umfelderfassung im assistierten und automatisierten Fahren bestimmt. Für diese wird jeweils untersucht, welchen Beitrag die Radarsensorik leisten sollte. Darunter werden Eckstein-Anwendungsfälle (Corner Use Cases) ausgewählt und priorisiert.
Aus allen Eckstein-Anwendungsfällen zusammengenommen leiten die Partner die Applikationsanforderungen an die Radarsensorik und die Highspeed-Vernetzung auf Basis von Ethernet TSN (time sensitive network) ab.
Im Anschluss erfolgt eine Auslegung der Sensor- und Antennenanordnung eines kohärenten, verteilten Radarnetzwerks. Es werden die Schlüsselanforderungen, insbesondere an die Phasenkohärenz und die zulässigen Phasenfehler zwischen den Radarsensoren als Eingangsgröße für AP2 definiert.
Darüber hinaus definieren die Partner die in diesem Vorhaben umzusetzenden Demonstratoren und Komponenten dieser. Dazu gehören:
- Ein FC-Demonstrator, der exemplarisch mindestens einen der Anwendungsfälle (Use Cases) darstellt.
- Die Architektur des verteilten Signalverarbeitungskonzepts
- Die Radar-Frontends
- Die Highspeed-Vernetzung auf Basis von TSN
Bei der Spezifikation dieser Demonstratoren und Komponenten wird darauf geachtet, dass sie sich zur Anwendung von KI-Algorithmen eignen.
Zum Abschluss des Vorhabens bestimmen die Partner auf Basis der gesammelten Erfahrungen Anforderungen für zukünftige Radarsensorik-Generationen als Beitrag zur Spezifikation zukünftiger Systeme und zur Ermittlung der Bedeutung der Radarsensorik innerhalb der Sensor-Modalitäten.
Dabei wird berücksichtigt, welche Anforderungen nach dem im Vorhaben erreichten Stand technisch umsetzbar sind.
Die Partner betrachten dabei insbesondere die Anforderungen an ein kohärentes Sensornetzwerk aufgeschlüsselt in Radar-Frontend, Radar-SoC, Sensorknoten und Netzwerkinfrastruktur.
Arbeitspaket 2: Robert Bosch GmbH
In AP2 wird das Gesamtkonzept und die Systemarchitektur für ein verteiltes digitales Radar im Fahrzeug entwickelt, implementiert und bewertet.
Zunächst werden die Kernelemente des Konzepts, die Synchronisation der Knoten und die Rechner/SW-Architektur, entwickelt. Bei der Synchronisation wird eine leitungsgebundene und eine nicht leitungsgebundene Synchronisation erstellt. Hier besteht die Herausforderung optimale Konzepte hinsichtlich Performance und Aufwand zu finden. Die sich daraus ergebenden Anforderungen an die Halbleiterkomponenten werden anschließend einem eigenen Unter-AP abgeleitet. Anschließend wird die Synchronisation der Radarknoten implementiert und mit Hilfe von Fast Chirp-Radaren verifiziert. Parallel dazu erfolgt die Umsetzung der Rechner und SW-Architektur mit Hilfe eines FPGAs. Darauf basierend erfolgt eine umfassende Bewertung der Konzepte hinsichtlich Leistungsfähigkeit, technischem Aufwand sowie den Kosten des Systems.
Arbeitspaket 3: Ruhr Universität Bochum
Im Vergleich zu den etablierten Einzel-Radarsensoren, ergeben sich für den Betrieb in einem Radar-Netzwerk anspruchsvolle zusätzliche Anforderungen. Zwar verwenden heutige Automobile bereits mehrere Sensoren, hier beschränkt sich die Synchronisation allerdings darauf, dass diese sich gegenseitig nicht stören. Im Rahmen von VERANO sollen mehrere Konzepte untersucht werden, die es ermöglichen, die Sensoren für gemeinsame bistatische Messungen zu betreiben. Für einfache inkohärente Messungen genügt es dabei, eine Synchronisation zu erreichen, die deutlich besser ist als die Signallaufzeit durch die Luft, so dass sub-Nanosekunden notwendig sind. Allerdings können erste voll-kohärente Messungen den Phasenbezug erhalten und damit alle Möglichkeiten der Radartechnik ausreizen. Dazu ist dann allerdings eine Synchronisation notwendig, die deutlich kürzer als eine Periodendauer ist, sodass hier sub-Pikosekunden notwendig sind.
Um die verschiedenen Konzepte der Synchronisation zu evaluieren, sollen im Rahmen dieses Arbeitspaketes modifizierte Radarchipsätze und Frontends für eine innovative Messplattform entworfen werden. Als Synchronisationsansatz kommen hier sowohl leitungsgebundene als auch leitungslose Konzepte in Betracht. Ferner ist zu untersuchen, ob diese Leitung zwingend als Hochfrequenzverbindung auszulegen ist, oder ob eine niederfrequente Verbindung ausreicht und gegebenenfalls mittels eines gewöhnlichen Automobil-Busses realisiert werden kann.
Die realisierten, anspruchsvollen Schaltungen können dabei von den neusten Entwicklungen von Infineons B12HFC-Technologie und dem eWLB-Package profitieren.
Arbeitspaket 4: Karlsruher Institut für Technologie
Vorbereitend für die Vernetzung der einzelnen Radarsensoren werden in AP4 die Grundlagen durch den Entwurf und die Implementierung der Signalverarbeitungs- und Synchronisationsmethoden für die Edge Devices gelegt. Diese müssen modular aufgebaut sein, sodass Teile der Prozessierungskette zwischen den Edge Devices und der Zentraleinheit verschoben werden können. Hierdurch kann analysiert werden, welche Teile der Radarsignalverarbeitung am effizientesten in den Edge Devices oder der Zentraleinheit durchgeführt werden und welche Datenraten sich dadurch ergeben. Ergänzend zu den klassischen, FFT-basierten Auswertealgorithmen sollen auch KI-basierte Methoden untersucht werden.
Ein für die Vernetzung elementarer Baustein stellt darüber hinaus die Synchronisation der Einzelsensoren dar, um frequenz-, zeit- und sogar phasensynchrone bi- und multistatische Radarmessungen durchführen zu können. Hierfür können sowohl digitale Verfahren auf Basis bereits bestehender Leitungen, zusätzliche Signalleitungen oder die Luftschnittstelle genutzt werden. Für alle drei Varianten sollen entsprechende Ansätze erarbeitet, simuliert und evaluiert werden. Die vielversprechendsten Ansätze sollen dann in einem Demonstrator implementiert und verifiziert werden. Je nach Synchronisationsverfahren sind unterschiedliche Genauigkeiten zu erwarten, die wiederum Einfluss auf die Radarbildgebung haben werden. Dieser Aspekt soll ebenfalls in AP4 analysiert werden.
Um multistatische Radarmessungen durchführen zu können, müssen sich die Sichtbereiche der Sensoren zumindest zum Teil überdecken. Zudem soll durch die verteilten Sensoren eine möglichst gute Winkelauflösung erreicht werden. Hierfür müssen sowohl geeignete Antennenarrays für die Einzelsensoren als auch darauf abgestimmte Algorithmen entwickelt werden, da bei Abständen von bis zu 1 m und Lücken im entsprechenden virtuellen Array Mehrdeutigkeiten und Nebenkeulen entstehen können, die die Winkelschätzung beeinträchtigen.
Zur Anbindung der Einzelsensoren an die Zentraleinheit werden geeignete Verfahren benötigt, um die zu übertragenden Daten komprimieren zu können. Wie groß der Komprimierungsfaktor sein muss, hängt einerseits von der Menge der zu übertragenden Daten und andererseits von der Größe der zur Verfügung stehenden Bandbreite zwischen den Edge Devices und der Zentraleinheit ab. Ersteres ist wiederum davon abhängig, welche Teile der Signalverarbeitungskette bereits auf dem Edge Device selbst ausgeführt werden und welche erst auf der Zentraleinheit. Entsprechend müssen auch die Komprimierungsverfahren an die jeweilige Verteilung angepasst werden. Das nach der Evaluation am besten geeignetste Kompressionsverfahren soll dann im Demonstrator, der in AP8 aufgebaut und messtechnisch analysiert wird, implementiert werden.
Arbeitspaket 5: Missing Link Electronics
Ziel des Arbeitspaket 5 ist die Erstellung eines initialen Laboraufbaus („Lab-Car“) zum Test und zur Demonstration für vernetzte Zonen-Gateways und High-Performance Embedded Computer Zentralrechner via High-Speed Ethernet TSN. Dieser Aufbau soll es ermöglichen, das Echtzeitverhalten und die zeitliche Synchronizität nachzuweisen. Das Ziel ist hier die Reduktion des „Jitter“ der Zeitsynchronisation.
Die Arbeitsinhalte in diesem Arbeitspaket bestehen folglich aus Entwurf und dem hardwareseitigen Aufbau der Versuchs- und Testumgebung. Dies beinhaltet zum einen den Aufbau der eigentlichen Hardware und zum anderen die Integration der Meß- und Prüfeinrichtungen, die Integration und die Verifikation von 3rd -party IP-Cores sowie dem Entwurf von Ethernet TSN mit 10GBit/s und Umsetzung für die TSN Endpunkte und TSN Switches. Abhängig von den Signalverarbeitungskonzepten aus AP4a und AP6 werden hier Anforderungen für den den Kommunikationslink zwischen Radarknoten, Zonen-Gateway und Zentralrechner definiert und berücksichtigt.
Im Folgenden werden im Rahmen dieses Arbeitspaketes Methoden zur hochpräzisen Zeitsynchronisation zwischen den Radarsensorknoten entwickelt und in den Versuchsaufbau integriert, getestet und validiert. In einem weiteren Schritt werden Härtungskonzepte für höchste Zuverlässigkeit, um beispielsweise Anforderungen an die funktionale Sicherheit erfüllen zu können, integriert, getestet und validiert. Hierbei handelt es sich vor allem um die Erforschung und Umsetzung von ISO26262 Härtungskonzepten für die TSN Netzwerkarchitektur, Erweiterung von Ethernet TSN für höchste Zuverlässigkeit mittels Frame Replication, IEEE 802.1CB (TSN Endpunkt und TSN Switch).
Arbeitspaket 6: Universität Ulm
In Arbeitspaket 6 liegt der Fokus auf der Signalverarbeitung sowie der KI-basierten Datenverarbeitung. Das Ziel ist, ein Konzept für die Signalverarbeitung im digitalen Radarnetzwerk zu entwerfen und zu bewerten. Dabei wird insbesondere auch untersucht, wie die Schritte der Signalverarbeitung zwischen den Edge-Devices und dem Zentralrechner aufgeteilt werden, wobei hierfür anhand der Performance, dem Informationsgehalt der Auswertung und der zu übertragenden Datenmengen Bewertungskriterien erarbeitet werden. Auf dieser Basis kann der Trade-Off bei der Algorithmikverteilung herausgearbeitet und demonstriert werden. Durch die Verteilung von KI-Modellen auf das Sensornetz sollen zudem erstmals Robustheitsaspekte, wie z. B. ausfallende Sensoren untersucht werden.
In Zentral- und Zonencomputern müssen die Daten verschiedener Edge-Devices fusioniert werden. Dabei gilt es, sowohl monostatische, als auch multistatische Messungen zu berücksichtigen. Die Datenfusion ermöglicht es, die von verschiedenen Sensoren gewonnenen Informationen zu kombinieren und so das Sensornetzwerk bestmöglich auszunutzen. Dabei werden insbesondere auch Fusionsansätze basierend auf verschiedenen Abstraktionsebenen der Informationsverarbeitung untersucht. So können beispielsweise KI-Methoden nicht nur auf erzeugte Punktwolken angewandt, sondern tiefer in die Sensoren integriert werden. Hieraus ergeben sich auch Anforderungen an die Datenübertragung. Um diese zu erfüllen, werden die Dateninterfaces und die Transportmethoden zwischen Edge-Device und Zentralrechner durch die Projektpartner analysiert und optimiert.
Durch die Datenfusion erhöhen sich so die zur Verfügung stehenden Informationen. Hierdurch werden insbesondere eine hochauflösende Winkelschätzung und somit ein präziseres Imaging erreicht. Dies bietet essentielle Vorteile für die Radar-basierte Objektdetektion mittels maschineller Lernverfahren. Für die Winkelschätzung müssen von den Projektpartnern angepasste Signalverarbeitungskonzepte und Algorithmen entworfen werden. Diese sollen es ermöglichen, die Subaperturen verschiedener Sensoren für eine gemeinsame Winkelschätzung zu verknüpfen. Die Herausforderungen liegen hierbei zum einen in der notwendigen Synchronisierung der Sensoren, die eine ausreichende Phasenkohärenz gewährleisten muss, und zum anderen in der Auslegung des Netzwerks und der Auswertung des tendenziell stark ausgedünnten virtuellen Arrays. Darüber hinaus wird die Echtzeitfähigkeit der Algorithmen überprüft.
Zusätzlich zur konventionellen Signalverarbeitung werden in AP6 KI-Modelle zur Komprimierung der Daten sowie zur Datenverarbeitung oder -interpretation untersucht. Dies kann beispielsweise einer effizienteren und zuverlässigeren Objekterkennung dienen. Auch hier liegt der Fokus auf einer geschickten Aufteilung der KI-Modelle auf Edge-Devices, Zonen- und Zentralcomputer, und dem Ausnutzen der durch das Netzwerk zur Verfügung stehenden Sensoren.
Arbeitspaket 7: Infineon Technologies AG
In Arbeitspaket 7 werden schwerpunktmäßig zwei Themen adressiert: Dies ist zum einen die Definition und SW-technische Realisierung von entsprechenden AUTOSAR-konformen Treibern für zukünftige Radar-MCUs und TSN relevanter Treiber. Ebenfalls wird in diesem Schwerpunktthema ein Konfigurationstool für eine FFT HW-Beschleuniger IP definiert und entwickelt.
Zum anderen werden zentralisierte und verteilte KI-Methoden entwickelt, evaluiert und hinsichtlich der Gesamtintegration in zukünftige Zonen-basierten E/E Architekturen ausgelegt und bewertet.
Entsprechende Meilensteine sichern die gesetzten Gesamtziele in den beiden zuvor beschriebenen Schwerpunktthemen ab.
Arbeitspaket 8: Infineon Technologies AG
Im Arbeitspaket 8 werden, basierend auf den Ergebnissen der anderen Arbeitspakete, Demonstratoren aufgebaut und evaluiert. Hierfür werden insbesondere 2 Labordemonstratoren (OFDM und FC) für die Radarnetzwerke erstellt und evaluiert.
Des Weiteren werden zonenbasierte Demonstratornetzwerke erstellt um eine Performanceanalyse daran durchzuführen, als auch die entwickelten KI-Methoden darauf anzuwenden und zu evaluieren.
Außerdem wird ein Testfahrzeug mit prototypischen Radarmodulen ausgestattet, um in Fahrversuchen auf einem Testgelände Daten für die Algorithmenentwicklung zu erfassen.
Arbeitspaket 9: Infineon Technologies AG
Dieses AP beinhaltet das Management des Gesamtprojektes, darunter fallen insbesondere das Controlling der Arbeitsfortschritte, eine fortlaufende Risikobewertung und die Ergreifung von Maßnahmen zur Risikominimierung, die Koordination der Arbeiten zwischen den Projektpartnern, die enge Abstimmung mit dem Projektträger sowie die Erstellung der Zwischenberichte und des Abschlussplans.
Fortschritt durch Zusammenarbeit: Das VERANO-Projekttreffen am KIT
Am 21. und 22. Mai 2025 versammelten sich führende Expertinnen und Experten aus Forschung und Industrie am Karlsruher Institut für Technologie (KIT) und im FZI House of Living Labs, um gemeinsam an den Zukunftstechnologien digitaler und energieeffizienter Radarnetzwerke zu arbeiten.
Unser Forschungsprojekt VERANO widmet sich der Entwicklung innovativer Lösungen für heterogene E/E-Fahrzeugarchitekturen und bringt zahlreiche Partner zusammen, darunter Bosch, Infineon, MB, KPIT, RUB, TUBS und viele weitere.
Spannende Themen und wegweisende Erkenntnisse
Die Agenda war gespickt mit hochaktuellen Entwicklungen:
- Edge Device Hardware – Fortschritte in der Demonstration und Anwendung innovativer Systeme
- KI-basierte Signalverarbeitung & Datenkompression – neue Ansätze für effizientere Radarverarbeitung
- Synchronisation und Time Sensitive Networks – Breitband-Datenübertragung in Echtzeit
- Netzwerk-Signalverarbeitung und Radar-SDK – gemeinsame Standards und Schnittstellen für verbesserte Datenfusion
Neben den technischen Diskussionen war auch das Networking ein wichtiger Bestandteil unseres Treffens. Das gemeinsame Mittagessen sowie die Besichtigung von Demonstratoren boten eine perfekte Gelegenheit zum interdisziplinären Austausch.
Auf dem Weg zur nächsten Meilenstein
Neben den aktuellen Fortschritten stand auch die Vorbereitung auf die Abschlussveranstaltung von OCTOPUS am 13. November 2025 im Fokus. Hier werden die gesammelten Erkenntnisse und Demonstratoren umfassend vorgestellt.
Ein herzliches Dankeschön an alle Teilnehmerinnen und Teilnehmer, die mit ihrem Fachwissen und Engagement zum Erfolg dieses Treffens beigetragen haben. Die Zukunft der Radartechnologie wird aktiv mitgestaltet – und VERANO spielt dabei eine entscheidende Rolle!
VERANO goes IEEE Radar Conference in Denver, 06.05.2024
Virtual Array Transformation for Large Apertures in Cooperative Automotive Radar Networks
Im Rahmen vom #VERANO-Projekt hat @Lukas Sigg von @KIT ein Paper bei der @IEEE Radar Conference in Denver veröffentlicht. In diesem Artikel präsentiert er eine fortschrittliche Methode, um große #Radarantennen mit großem Abstand zwischen den Subarrays in ein virtuelles, gleichmäßiges lineares #Array zu überführen. Solche großen Aperturen sind häufig in kooperativen #Automotive #Radarnetzwerken anzutreffen.
Um die Arrays zu transformieren, ist eine präzise Phasenkorrektur erforderlich. Die Berechnung dieser Phasen ist eines der Hauptthemen, die in diesem Artikel ausführlich behandelt werden. Die durchgeführten Simulationen und Messungen verdeutlichen die Vorteile eines solchen kooperativen #Netzwerks im Vergleich zu einem einzelnen Sensorknoten.
Lukas zeigt auch den Einfluss von Baseline-Fehlern auf die Genauigkeit der Transformation. Diese innovative Methode erfüllt die aktuellen Anforderungen der #Automobilindustrie, indem sie eine höhere Winkelauflösung ermöglicht, ohne die Anzahl der Antennenelemente eines einzelnen Sensors zu erhöhen. Danke Lukas für diese spannende Veröffentlichung!
Proklamation von Projekt VERANO
Working Session mit den schlauesten Köpfen der Branche!
Vom 25.-26. Mai 2023 fand unsere inspirierende Arbeitsgruppe zum Funding Projekt VERANO statt!
Ein herzliches Dankeschön an unseren Gastgeber, Jürgen Hasch von Bosch in Renningen.
Es war ein Treffen der besten Köpfe, um gemeinsam innovative Lösungen zu entwickeln, die unsere Welt verändern werden.
Nicht nur wir haben die Gelegenheit genutzt, unsere Fachkenntnisse zu teilen, sondern haben auch das Potenzial der Zusammenarbeit voll ausgeschöpft. Es ist erstaunlich, wie viel wir erreichen können, wenn wir unsere Kräfte bündeln und gemeinsam an einem Ziel arbeiten.
Ein großes Dankeschön an alle Teilnehmerinnen und Teilnehmer für ihre leidenschaftliche Hingabe und ihren Beitrag zu unserer Working Session! Eure Beiträge waren von unschätzbarem Wert und haben dazu beigetragen, dass das Projekt neue Horizonte erreicht.
Hier sind einige der erstaunlichen Statements, die während unserer Diskussionen gemacht wurden:
"Die Zusammenarbeit zwischen unterschiedlichen Fachgebieten bringt neue Perspektiven hervor und beschleunigt den Fortschritt."
"Projekt VERANO hat das Potenzial, das Leben von Millionen von Menschen zu verbessern. Lassen Sie uns gemeinsam an diesem Ziel arbeiten!"
"Nur durch den Austausch von Wissen und Erfahrungen können wir die größten Herausforderungen unserer Zeit bewältigen."
Wir sind stolz auf die Ergebnisse unserer Working Session und werden weiterhin daran arbeiten, die Vision vom Projekt VERANO in die Realität umzusetzen. Bleiben Sie gespannt auf weitere Updates und seien Sie Teil unserer Reise zur Veränderung!
VERANO PROJEKTTREFFEN NOV. 2023 am KIT
Vom 20. bis 21. November 2023 fand in Karlsruhe unser zweites Projekttreffen sowie spezialisierte Workshops statt. Zum ersten Mal hatte das Team die Gelegenheit, den Projekt-Demonstrator und das Demonstrator Fahrzeug in Augenschein zu nehmen. Letzteres wurde vor allem durch die Bemühungen von Maximilian Steiner von Mercedes realisiert.
VERANO-Review Mai 2024 an der Uni Bochum
Im Mai fand in Bochum an der Universität Bochum das Projekt-Review für das Projekt VERANO statt. Bei diesem Review kamen alle Projektpartner zusammen, um den aktuellen Stand ihrer Arbeitsprojekte zu präsentieren. Das Projekt VERANO, das von Infineon und mehreren Partnern durchgeführt wird, zielt darauf ab, innovative Radar-Technologien für die Automobilindustrie zu entwickeln und zu implementieren.
Während des Reviews präsentierten die Partner ihre Fortschritte und stellten verschiedene Hardware-Demonstratoren vor. Besonders hervorzuheben war das Auto von Mercedes, das mit den für VERANO eingebauten Radar-Sensoren ausgestattet war. Diese Sensoren sind in der Lage, hochpräzise Umgebungsdaten zu erfassen und tragen somit erheblich zur Sicherheit und Effizienz moderner Fahrzeuge bei.
Zusätzlich zu dem Radar-gestützten Fahrzeug wurden auch einzelne Radarmodule vorgestellt. Diese Module demonstrierten verschiedene technologische Fortschritte und Einsatzmöglichkeiten, die im Rahmen des Projekts entwickelt wurden. Sie zeigten eindrucksvoll, wie weit die Entwicklungen im Bereich der Radar-Technologie bereits fortgeschritten sind und welche zukünftigen Anwendungen möglich sind.
Das Review in Bochum bot den Teilnehmern eine wertvolle Gelegenheit, sich über den aktuellen Stand des Projekts auszutauschen, Feedback zu geben und gemeinsame Ziele für die kommenden Monate zu definieren. Insgesamt war das Treffen ein wichtiger Meilenstein für das Projekt VERANO und unterstrich die Bedeutung der Zusammenarbeit zwischen Industrie und Wissenschaft, um innovative Lösungen für die Mobilität der Zukunft zu schaffen.
VERANO OCTOPUS-Treffen 17.09.2024
Ein inspirierendes Vernetzungstreffen der OktopusGruppe liegt hinter uns. Die Diskussionen mit den Kollegen der anderen Projekte haben uns neue Perspektiven eröffnet und uns motiviert!
Gemeinsam mit den Kollegen Maximilian Steiner, Rossen Michev und Hasan Hüseyin Tekin haben wir im Team unser aktuelles Projekt VERANO vorgestellt.
Wir sind unglaublich stolz auf die geleistete Arbeit und die Leidenschaft, mit der jeder an diesem Projekt beteiligt ist.
Ein herzliches Dankeschön an das BMBF für die fantastische Organisation des Tages.
VERANO Projekttreffen Uni Ulm Oktober 2024
VERANO - 4. Projekttreffen erfolgreich abgeschlossen!
Wir freuen uns, dass das 4. Projekttreffen von #VERANO ein voller Erfolg war. Gastgeber waren die Universität Ulm und Missing Link Electronics. Ein herzliches Dankeschön an Prof. Dr.-Ing. Christian Waldschmidt, Leiter des Instituts für Mikrowellentechnik, sowie an Dr. Endric Schubert, Co-Founder & CTO, und Ulrich Langenbach, Director Engineering bei MLE, für die hervorragende Organisation.
Ein besonderes Highlight war die spannende #Laborführung bei Missing Link Electronics, die uns tiefere Einblicke in die neuesten Entwicklungen ermöglicht hat. Die Zusammenarbeit zwischen der Uni Ulm und MLE zeigt eindrucksvoll, wie Forschung und Praxis Hand in Hand gehen können.
Wir freuen uns auf die nächsten Schritte und die weitere Zusammenarbeit in diesem zukunftsweisenden Projekt!
Veröffentlichungen im Rahmen von VERANO
Vorgängerprojekt Radar4FAD
VERANO rollt auf den Straßen der Innovation
VERANO ist eine bahnbrechende Initiative, die die Grenzen der Radartechnologie neu definiert. In Zusammenarbeit mit allen Partnern, u.a. auch Mercedes Benz haben wir einen Demonstrator entwickelt, der die beeindruckenden Fähigkeiten dieser Technologie zeigt.
Und jetzt zur spannendsten Neuigkeit: Unser Fahrzeugdemonstrator ist nun mit dem Branding von Verano foliert! Dieser Schritt symbolisiert nicht nur unsere starke Partnerschaft mit Mercedes Benz, sondern auch unseren Stolz auf die Errungenschaften, die wir im Rahmen dieses Projekts erzielt haben.
Bleiben Sie dran, um mehr über die aufregenden Entwicklungen im Projekt Verano zu erfahren. Die Zukunft der Radartechnologie beginnt hier!
VERANO MLE Demonstratorvorstellung
Präzision in Echtzeit: Ulrich Langenbach präsentiert den White Rabbit Demonstrator für das VERANO-Projekt
Wir freuen uns, euch Ulrich Langenbach vorstellen zu dürfen. Ulrich ist ein erfahrener Experte bei Missing Link Electronics, wo er als Senior Manager tätig ist. Sein Fokus liegt auf der Entwicklung innovativer Technologien im Bereich der eingebetteten Systeme.
Aktuell arbeitet Ulrich und die MLE maßgeblich am Projekt VERANO mit. Gemeinsam entwickeln wir Lösungen für hochpräzise und zuverlässige Netzwerksynchronisation in Echtzeitsystemen. In diesem Video gibt er einen exklusiven Einblick in den Demonstrator, der auf der White Rabbit-Technologie basiert und im Rahmen des Projekts VERANO entwickelt wurde.
Jetzt ansehen und mehr erfahren!
#Innovation #Technologie #WhiteRabbit #VERANO #Networking #Forschung #Zusammenarbeit
VERANO Demonstrator BOSCH
Die Zukunft der Automobilradar-Technologie: Der Bosch Radar-Demonstrator
Automotive Radar ist entscheidend für die Verkehrssicherheit. Mit dem Fortschritt in Richtung automatisiertes Fahren müssen herkömmliche Radarsysteme jedoch mehr bieten. Die Lösung liegt in verteilten Radarsensoren. In diesem Blogbeitrag werden wir die neuesten Entwicklungen in der Radartechnologie von Bosch untersuchen und wie diese Technologien die Zukunft des Fahrens gestalten werden.
Die Notwendigkeit verteilter Radarsensoren
Standardradarsysteme sind nicht mehr ausreichend, um den Anforderungen des automatisierten Fahrens gerecht zu werden. Die Idee hinter verteilten Radarsensoren ist einfach: Durch die räumliche Verteilung kleinerer Sensoren rund um das Fahrzeug schaffen wir eine große effektive Antennenöffnung. Dies ermöglicht eine hohe Auflösung, ohne das Design des Fahrzeugs zu beeinträchtigen.
Wie funktionieren verteilte Radarsensoren?
Verteilte Radarsensoren arbeiten, indem sie die Daten von mehreren Sensoren zusammenführen, um ein vollständiges Bild der Umgebung zu erstellen. Diese Methode verbessert die Genauigkeit und Zuverlässigkeit der Objekterkennung und -verfolgung erheblich. Durch die Kombination der Informationen von verschiedenen Sensoren kann das System auch unter schwierigen Bedingungen, wie z.B. bei schlechten Lichtverhältnissen oder ungünstigen Wetterbedingungen, effektiv arbeiten.
Das Verano-Projekt: Fortschritte in der Radartechnologie
Das Verano-Projekt treibt diese Technologien voran. Es konzentriert sich auf effiziente Datenverarbeitung, Synchronisation und die optimale Verteilung der Rechenlast zwischen Netzwerkcontrollern, Sensorknoten und zentralen Computern. Diese Forschungsinitiative hat das Ziel, die Fähigkeiten von Radarsystemen weiter zu verbessern und sie für die Anforderungen des automatisierten Fahrens fit zu machen.
Effiziente Datenverarbeitung
Ein wesentlicher Aspekt des Verano-Projekts ist die effiziente Datenverarbeitung. Radarsysteme erzeugen große Mengen an Daten, die schnell verarbeitet werden müssen, um eine Echtzeit-Reaktion zu ermöglichen. Bosch arbeitet an Algorithmen, die diese Daten effizient analysieren und interpretieren, um eine präzise Entscheidungsfindung zu gewährleisten.
Synchronisation der Sensoren
Ein weiterer wichtiger Punkt ist die Synchronisation der verschiedenen Sensoren. Um eine präzise Wahrnehmung der Umgebung zu gewährleisten, müssen die Sensoren genau abgestimmt arbeiten. Bosch erforscht Methoden zur Synchronisation der Sensordaten, um sicherzustellen, dass die Informationen in Echtzeit und ohne Verzögerung verarbeitet werden.
Verteilung der Rechenlast
Die Verteilung der Rechenlast ist entscheidend für die Leistung des Radarsystems. Bosch entwickelt Technologien, die es ermöglichen, die Rechenlast effizient zwischen verschiedenen Komponenten des Systems zu verteilen. Dies führt zu einer besseren Leistung und einer höheren Effizienz des gesamten Systems.
Der Bosch Software Defined Digital Radar Demonstrator
Ein bedeutender Fortschritt in der Radartechnologie ist der Bosch Software Defined Digital Radar Demonstrator. Dieser Demonstrator besteht aus vier Hauptkomponenten:
- RF SoC Modul: Dieses Modul ist das Herzstück des Radarsystems und ermöglicht die Signalverarbeitung.
- Backend: Das Backend kümmert sich um die Datenverarbeitung und -analyse.
- Dalo-Generierung: Diese Komponente ist für die Erstellung der Radarinformationen verantwortlich.
- Frontend: Das Frontend ermöglicht die Benutzerinteraktion und das Management der Radardaten.
Dieser Demonstrator zeigt, wie Bosch innovative Techniken in der Radartechnologie implementiert, um die Anforderungen des automatisierten Fahrens zu erfüllen.
Die Zukunft der Radartechnologie
Die Entwicklungen in der Radartechnologie von Verano sind vielversprechend. Mit dem Fokus auf verteilte Radarsensoren und die Optimierung der Datenverarbeitung wird die Radartechnologie nicht nur sicherer, sondern auch effizienter. Diese Fortschritte sind entscheidend für die Schaffung einer sicheren und zuverlässigen automatisierten Fahrumgebung.
Schlussfolgerung
Wir sind kontinuierlich bestrebt, Technologien zu entwickeln, die das Leben verbessern. Mit dem Bosch Software Defined Digital Radar Demonstrator und dem Verano-Projekt zeigt das Unternehmen, wie moderne Radartechnologien die Automobilindustrie revolutionieren können. Die Zukunft des Fahrens ist digital, und Bosch ist an vorderster Front dabei.
Innovationen im VERANO-Projekt ausgezeichnet
Im Rahmen der diesjährigen European Microwave Week in Paris hat unser Partner Rossen Michev von Bosch einen bedeutenden Erfolg erzielt: Der Demonstrator für das Projekt VERANO mit dem Titel "A Compact 77 GHz 4x4 MIMO Stepped Frequency OFDM Radar" wurde mit dem Best Paper Award auf der European Radar Conference (EuRAD) ausgezeichnet.
Der vorgestellte Demonstrator ist ein digital-moduliertes Edge-Device, das neue Möglichkeiten für End-to-End-Algorithmen in den Bereichen Synchronisation und kognitive Operationen eröffnet. Dies wird durch die rein softwaredefinierte Wellenform-Generierung ermöglicht. Dadurch können innovative Ansätze entwickelt und die Leistung verschiedener Synchronisationsmechanismen, die im Projekt untersucht werden, umfassend evaluiert und verglichen werden.
Dieser Erfolg ist ein Beleg für die Innovationskraft und das Potenzial des VERANO-Projekts, wegweisende Technologien zu entwickeln, die in der Praxis neue Maßstäbe setzen. Wir danken allen Mitwirkenden und Partnern, die diesen Fortschritt durch ihre Arbeit und ihr Engagement ermöglicht haben.
Das VERANO-Projekt steht exemplarisch für die Verbindung von Forschung und Technologie, um zukunftsorientierte Lösungen für die Herausforderungen von morgen zu schaffen.
Fördergeber Bundesministerium für Bildung und Forschung Elektronik
Rahmenprogram: Mikroelektronik. Vertrauenswürdig und nachhaltig.
Förderkennzeichen: 16ME0785K