最適化された半導体によって、安全柵の外でロボットと人の協調作業が可能になり、新しい自由度が生まれます。しかし、この種の協業を行うためのロボット(コボットとも言います)は、一定の設計基準を満たさなければなりません。
工場でコボットが人をサポート
ロボットは長い間、工場の生産ラインで働いてきました。世界中のメーカーは、生産性向上とコスト改善のメリットを受けています。インダストリー4.0およびスマートファクトリーを背景として、最新世代の産業用ロボットである協働ロボット、すなわち「コボット」は、従来の生産プロセスに変革をもたらしています。 コボットは、高い精度と作業の安全性を活かして、人と一緒に働いてそれぞれの生産プロセスで人をサポートします。、最終製品の品質も向上します。インフィニオンは、この新世代ロボットの高効率電子回路を実装できるようにするため、コントローラやパワーエレクトロニクス、さらには、センサー、安全およびセキュリティ向けチップに至るまで、広範囲にわたるコンポーネントを提供しています。
従来の産業用ロボットと違って、コボットは、安全柵が不要で、直接に人間と協調して作業できます。その安全要求事項に適合するには、定められた機能を満たすように設計しなければなりません。とくに、ロボットと人が安全に共同作業するためには、特別なセキュリティ方策が必要です。
コボットの主要な設計基準は次のとおりです。
- 高電力密度で、小さいフォームファクターのコントローラ
- 高精度、高密度、高効率
- 機能安全および作業領域にいる人の保護
- 軸数、ジョイント数、モータ数に応じたさまざまな機械構造
- 偽造に対する知的財産保護
- 安全の前提となるセキュリティ
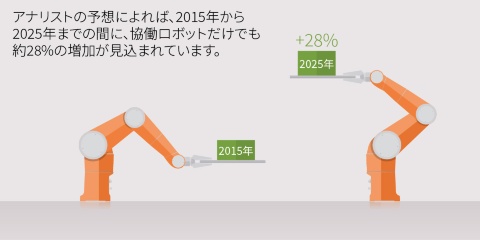
このような要件は、従来のロボット、産業用ロボット、前述の協働ロボットの開発において、インテリジェントで効率的な半導体ソリューションを使って充足されます。そして、この市場には大きな可能性があります。2015年の産業用ロボット市場の売上高は、全世界で約100億米ドルに達しています。アナリストの予想によれば、2015年から2025年までの間に、協働ロボットだけでも約28%の増加が見込まれています。
インフィニオンにおけるロボットおよびアプリケーション
インフィニオンは、ロボット向けの幅広い半導体ポートフォリオを持つだけでなく、さまざまな世代のロボットのユーザーでもあります。半導体生産設備は非常に高価なので、インフィニオンでは、非常に早い時期からオートメーションの最適化に重点を置き、機械を最大限に使用するとともに、生産品質を常に監視して調整できるようにしています。これにより、歩留まりが向上し、クリーンルーム設備の最大限の活用も実現しました。たとえば、完全に接続された生産など、現在インダストリー4.0で話題になっているコンセプトの多くは、すでにインフィニオンで使われています。また、今まで個別管理されていた生産現場を、移動ロボット、すなわちAGV(無人搬送車)によって統合できます。ドレスデン工場だけでも、生産現場のロボットに加えて170台を超える移動ロボットが稼働しています。これにより得られたロボットシステムの専門知識は、半導体チップの開発に反映されています。

新しいタイプのロボット:小型、俊敏、安全、セキュア
センサーテクノロジー、大量データの高速解析、人工知能、パワーエレクトロニクスの分野における技術の進歩によって、新世代のロボットが生まれています。ロボット市場は、転換期にあります。有名なトップ企業と並んで、比較的小規模なスタートアップ企業が市場に多く登場するトレンドが続いています。そのような企業は、新しいロボットコンセプトの基礎となる特別なアルゴリズムに注力しています。機械設計や電子回路ハードウェアにはあまり関心は高くないので、専門知識を持っていてその種の製品を提供するサプライヤーに依存しています。専門化した新しいロボットのスタートアップ企業は、このようにして数週間のうちに、幅広い分野で利用可能なロボットの基礎となる開発プラットフォームを構築できます。初期世代のロボットのように、対象アプリケーションごとに、費用のかかるプログラミングをする必要はありません。新しいロボットは、シンプルかつフレキシブルにプログラムを変更でき、新しい要件に適合するように、場合によっては自律的に、動作シーケンスを調整することができます。
最新ロボット向け半導体ポートフォリオ
新世代のロボットは、さまざまなアプリケーションで最新の半導体製品が使われる機会を生み出しています。その例としては、モータ制御、強力な位置および物体検出、高効率で小型のドライブ、電源および充電器、仮想安全柵の実装、セキュアな認証によるセキュリティ機能、キャリブレーションがあります。ネットに接続された生産環境での機能安全には、セキュリティが不可欠です。特に、アルゴリズムに専門技術が含まれているスタートアップ企業では、知的財産の保護も必須です。
その他の新世代ロボットの特長は、可能な限りコンパクトな設計、特に省スペースおよび高効率モータコントローラです。この特長は、IGBTおよびIGBTモジュール、低オン抵抗MOSFET(たとえばOptiMOS)、保護機能内蔵の高集積ゲートドライバによって実現可能となっています。また、機能安全の実現も特に重要な観点です。トルク、位置、圧力などのパラメータを、それぞれのセンサーによって精密に取得し、強力な安全コントローラ、たとえばAURIXファミリーでそのデータを処理する必要があります。
安全柵からの解放:人の保護

ロボットを安全柵から解放するためには、まず第一に、不注意または誤動作によって、高速動作中のロボットの危険領域に人が立ち入って負傷することを確実に防止しなければなりません。ロボットの感度を十分に高めるためには、高度なセンサーテクノロジーが必要です。
基本的には、人とロボットの間の空間だけでなく、ロボットとロボットの間の空間も安全にしなければなりません。その目的は、たとえば、小さい保護領域が、ロボットアームの動きに合わせて移動するというように、フレキシブルな保護領域を実現することです。保護領域の考え方は、仮想安全柵の実装に使われています。人が外周領域に立ち入ると、警告信号を出しますが、ロボットは最高速で動作を継続します。人が近づいてくると、速度を落として、それに応じた警告を出します。人が危険領域に侵入した場合のみ、ロボットが停止します。
このような保護メカニズムには、きわめて精密な物体検出機能が必要です。冗長なスキャン機能によって、最高レベルの機能安全を実現します。移動方向の検出も有用です。人が接近した後、遠ざかっているのか、または危険領域に侵入してくるのかを検知します。実際の脅威の状況をインテリジェントに認識することにより、不要なロボットの停止または減速をなくし、生産の損失やコスト増を回避できます。
インフィニオンは、これに関連して、パートナーと共同でToF(Time-of-Flight)を、またレーダーセンサーを開発しています。これによって、従来のライダー(LIDAR)スキャナよりも手頃なシステム価格で、環境を3Dでスキャンすることができます。3Dの解像度に特別なアルゴリズムを適用して、たとえば移動方向の予測を実現します。ドレスデン工場では、ToFの3Dカメラで環境を認識して、移動方向を予測するロボットのプロトタイプがすでに稼働しています。冗長性のための拡張として、24GHzおよび60GHzレーダーシステムも用意されています。
安全とセキュリティ
安全とセキュリティという二つの用語は、一見すると同じようにも思われますが、明らかな違いがあります。安全は、人の保護を扱いますが、セキュリティは、データ保護に関するものであって、ロボットをサイバー攻撃から保護することを目的としています。データセキュリティの観点において安全なシステムでなければ、機能安全であるとは言えません。機能安全は、インダストリー4.0やIoTに関連して、ますます重要になっています。暗号システムによって、ロボットが正しい機能だけを実行することを保証しなければなりません。この場合の目的は、特に、生産プロセスの一部としてのロボットを、有線または遠隔によるソフトウェア更新中のデータ改ざんから保護することです。ユーザーおよび新規追加されたコンポーネントのセキュアな認証も必要です。
正確に機能するためには、ロボットはキャリブレーションされていなければなりません。しかし、ハッカーがキャリブレーションデータを改ざんすれば、たとえば、ロボットは設定された動作範囲を超えて動作してしまいます。ここは、安全とセキュリティが交わるところです。効率的なセキュリティ保護がなければ、機能安全とは言えません。これは未来のシステムの主要な要件であり、特別なセキュリティコントローラ(OPTIGAファミリー)、またはHSM(ハードウェアセキュリティモジュール)機能付きのAURIXマイクロコントローラを使って対応します。セキュリティ機能がハードウェアに実装されているので、ユーザーは、暗号テクノロジーの詳細について最低限の知識があれば十分です。さらに、既存のソフトウェア実装への影響も、ごくわずかです。

より長距離の移動
高効率で小型の電源および充電機能は、移動ロボットで重要な役割を果たしています。最先端の CoolMOS、SiCおよびGaNテクノロジーに基づいて、インフィニオンは、従来のバッテリ充電器と比べて2~5倍の電力密度増加を予測しており、これにより移動ロボットの充電時間を短縮します。コードレス充電も可能です。ブレーキをかける際にバッテリを再充電すること(回生)で、電力をより効率的に利用できます。現代のパワー半導体によりこれが可能となり、無停電電源(UPS)でのバッテリ有効利用、たとえば電力のバッファリングを実現します。将来のインダストリー4.0工場では、ますます多くのバッテリ駆動AGVが利用されるようになり、AGVは相互接続されて、生産に必要な予備UPSバッテリのコストを大幅に削減します。充電中のAGVのバッテリは、ある程度は、工場内電力網の非常用電源としても利用できるからです。
ケーブル配線の簡素化
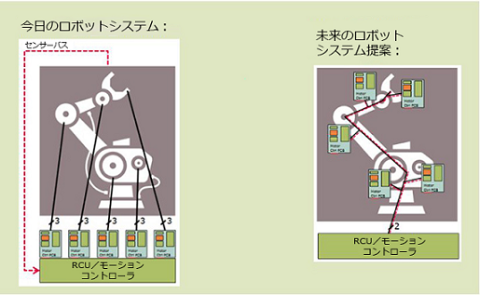
従来の産業用ロボットは、中央のモータコントローラと各軸にある多数のドライブによって動作することが一般的です。この方式の場合、典型的なロボットアームでは、モータごとに3相以上の太いケーブル、さらに、制御用およびセンサーデータ読み込み用の通信バスというように、大量のケーブルが必要です。
最新の半導体および電力線変調(電力線通信(PLC)テクノロジー)とモータ制御電子回路の統合によって、ケーブルの量を大幅に減らすことができ、その結果、重量とコストを低減します。研究室の実験では、インフィニオンは、ロボットアームのケーブル数を約30本から、わずか2~3本に削減しました。同時に、100Mbpsを大きく上回る通信速度を実現し、ほぼリアルタイムでの動作が可能になっています。ケーブルの減少は、過酷な産業環境でのインターフェイス低減にもつながり、信頼性向上をもたらします。このようなモータ制御システムのプロトタイプ第1号は、インフィニオンが必要なコンポーネントをとりまとめて現在準備中です。
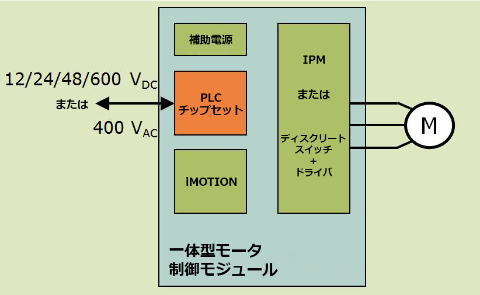
既存の電源回路に最適化された各PLCチップセット(12、24、48、600V DCまたは400V AC)は、インバータモジュールに内蔵される予定です。PLCテクノロジーと高電力密度のモータ用電子回路の一体化により、その場でのモータ制御を実現し、容易にロボットの軸に組み込むことができます。
効率的なメンテナンス
インダストリー4.0アプリケーション用のシステムでは、効率的な予知保全が必要です。モータ、モータコントローラ、およびシステム全体の状態は、電圧、電流、周波数、温度、圧力、ノイズ、ガスなどの監視による非侵襲的方法でスキャンしなければなりません。次に、このデータを処理して、機械特有のアルゴリズムによって得られる基準値とセンサー値を比較します。適切な監視で、故障停止時間を削減し、インダストリー4.0の基盤を築きます。
インフィニオンは、WiFiまたはUSB経由でPCに接続される、このようなアプリケーション向けの特別なセンサーボックスを開発しました。一つのボックスには、Arduinoシールド形式のセンサーを2個まで収容できます。最大で4個のボックスに、USBハブ経由で、シリコンマイク、圧力、電流、角度、CO2、レーダー、磁気3Dセンサーなど、最大8個のセンサーを接続することができます。このソリューションにより、幅広いセンサーのポートフォリオを通じて、関心のあるお客様に対して、監視機能に最適なセンサー選択を提供し、各アプリケーション用の独自アルゴリズムの開発を実現します。

まとめ
ロボット工学の分野では、コントローラ小型化、協働および非協働環境でのインテリジェントな安全方策、常に変化する作業環境および作業内容に対するサポート、改ざんおよびハッカー攻撃に対する保護のためのセキュリティ機能向上に対する要求がますます強くなっています。このロボット革命により、新しいタイプのロボット、すなわち協働ロボットが生まれました。ロックされた安全柵は不要で、人間と直接的に協調動作し、人間の横に並んで作業することができます。協働ロボットは、危険な衝突を完全に防止するために、動力および力を制限する先進的なセンサーおよび制御コンポーネントを装備しており、最高レベルの安全要求事項に適合しています。安全機能、高速で精密なセンサー、高効率の電源コンポーネントを備えた今日のマイクロコントローラは、人のためだけでなく、人と一緒に働く新世代のロボットにも新風を吹き込んでいます。
更新:2018年4月