车用 ToF 3D 图像传感器
车内REAL3™ ToF传感器助力提升汽车应用的舒适性和安全性
英飞凌REAL3™车用深度图像传感器基于3D飞行时间(ToF)技术,能为各种车内外应用提供最为准确和稳健的深度感应知能力。随着汽车的发展,为支持更高级别的自动驾驶,以及以更直观的方式实现司乘与车辆之间的交互(HMI),设计人员越来越关注自由度、灵活性、舒适性,以及最为重要的安全性。
英飞凌REAL3™ 3D车内感应摄像头通过驾驶员监控、乘员检测和智能安全气囊系统等应用采集并处理所需数据,以确保高标准的被动安全性,这些系统均采用根据ISO26262 ASIL-B标准开发的深度图像传感器。3D深度数据还具有出色的反欺骗功能,可用于安全的人脸身份验证,从而实现车内支付或访问私人数据和云服务,甚至通过人脸识别打开车门。ToF摄像头也支持安全导航和防碰撞等外部感应功能。此外,手势控制和全自动泊车等舒适性功能可让驾驶员充分体验驾驶便利性。高分辨率ToF摄像头使用3D感应技术扫描汽车周围和地面区域,无论光照条件如何,都能检测到路缘石、墙壁或其他障碍物。
产品
| 产品 | 产品状态 | 封装 | 系统分辨率 | 像素 | 波长 | Tamb | 认证/标准 |
| IRS1125A | 量产 | PG-LFBGA-84 | 100 kpxl (CIF) | 352 x 288 | 850 nm (940 nm) |
-40°C - 105°C |
AEC-Q100, grade 2 |
| IRS2877A | 量产 | PG-LFBGA-65 | 307 kpxl (VGA) | 640 x 240 | 940nm |
-40°C - 105°C |
AEC-Q100, grade 2 |
| IRS2877AS | 即将上市 | PG-LFBGA-65 | 307 kpxl (VGA) | 640 x 240 | 940nm |
-40°C - 105°C |
AEC-Q100, grade 2/ |
REAL3™产品系列还包括消费类应用的专用深度图像传感器 。
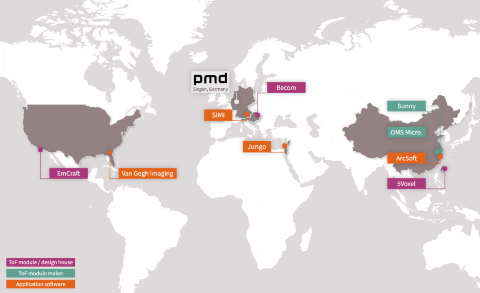
点击此处查看英飞凌强大的REAL3™图像传感器合作伙伴网络
随着自动驾驶能力的发展,驾驶员的常规驾驶任务逐渐减少,几乎变身为“乘客”。这意味着汽车正在逐步变成具有全新车内概念的“生活空间”,可满足大家的娱乐、工作和休闲期望。
对此,REAL3™飞行时间(ToF)摄像头是最佳解决方案,可满足日益增长的舒适性和便利性需求,同时确保可靠先进的被动安全性。此外,ToF摄像头可简化其他电子系统(例如座椅垫和安全带传感器)的物料清单(BOM)。
REAL3™ 改善舒适性能的示例
- • 手势控制
• 安全的3D人脸身份验证(反欺骗)与驾驶员监控相结合
• 精心设计的车内照明,只照亮驾驶员或乘客可触及的区域(例如靠近手部的旋钮)
• 自动设置预定义喜好
• 优化后视镜或座椅位置的建议
• 双显示屏,驾驶员或乘客可定制所显示的内容和功能
• 根据车载音响位置和乘员优化音频根据乘员头部位置优化音频
REAL3™ 增强乘员安全保障
- 驾驶员监控具有精确的头部位置、闭眼检测、注视区域分割
- 检测驾驶员离开座位、驾驶员分心、疲劳、手握方向盘
- 乘客检测和分类:准确估算身高和体重
- 儿童存在检测
- 智能安全气囊:根据实际情况调整压力或关闭
- 头部位置到安全气囊(例如在自动驾驶模式下改变座椅位置,比如靠背位置)
- 后向婴儿座椅
- 放置在座位上或由乘客携带的物品
- 检测安全带是否系紧
欢迎下载我们的应用简介:3D车内感应(使用REAL3™飞行时间成像仪传感器IRS2877A(S))。
自动驾驶且高度自动化的汽车需要围绕车身部署可靠的传感器环带,以便感应并了解周围的环境。雷达、激光雷达和摄像头等不同技术的融合通常能够达到这种效果。这些传感器非常适合近程和远程应用,但是,根据自动驾驶级别(SAE 1-5 级)以及传感器的要求和位置,为实现传感器环绕,可能还需覆盖低至地面的近程盲点。其所需分辨率和性能均超出了现有超声波传感器的能力范围。
利用闪光激光雷达技术的飞行时间 (ToF) 摄像头解决方案,体积小巧,无运动部件,且成本相对较低,最为适用。该摄像头可实现强大的高分辨率(水平和垂直) 3D 环境可视化,覆盖范围高达10m。除高精度像素级深度数据外,ToF 传感器还支持不受光照影响的值图像,因此,汽车可识别街道等环境中的标志。
该可靠 3D ToF 数据流可用于支持环绕汽车的各种应用:
避开障碍
- 自动车门
- 自动泊车
- 自动驾驶
- 覆盖自动驾驶传感器环带周围的近程盲点
- 车辆启动阶段的动态态势感知
- 辅助传感器数据流,支持自动驾驶模式
无钥匙进入
- 具有安全 3D 身份验证功能的人脸识别


